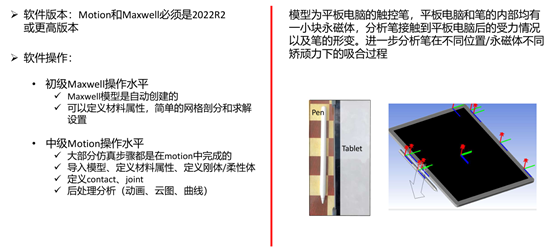
ANSYS双向耦合磁吸结构仿真案例
什么是磁吸结构
-使用永磁体之间的磁力进行关闭、密封或定位的结构
-广泛应用于消费电子、家电、工业及汽车等领域,其中消费电子领域包括但不限于笔记本电脑、平板电脑、手机、磁吸键盘、触控笔、智能保护套等
-典型的磁吸结构应用为:消费电子产品中的定位器、连接器、传感设备等
磁吸结构设计挑战
-磁吸闭锁时,过大的磁力会损坏外壳、连接器等结构
-用户体验是重要的设计目标(用户可以轻易地将物体磁吸合并分离)
-难以对磁铁间的作用力进行建模,以及确定物体间的冲击力
ANSYS Motion如何提供助力
-满足指定应用场景的磁力设计
-在满足磁力的要求下,减少尺寸和降低成本
-预测移动轨迹、闭合速度和冲击力
-预测冲击后的机械应力
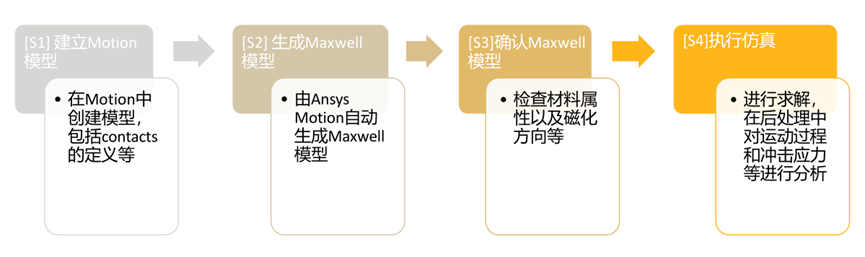
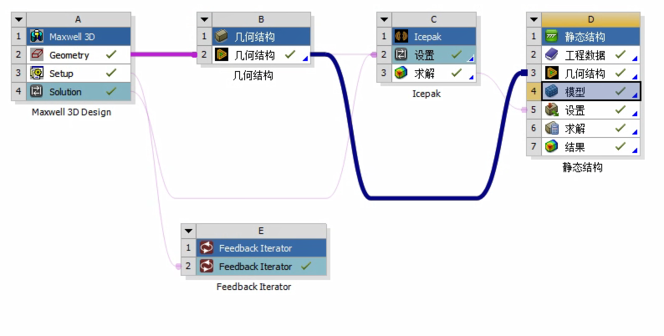
Motion与Maxwell双向耦合工作流简介
2022R2新功能:Motion和Maxwell最新仿真流程-全自由度的Ansys Motion与Maxwell联合仿真• 自动创建后处理(report和field plot)-在每个Motion求解时间步中,Maxwell中的物体会根据Motion传递的数据进行移动和旋转。Maxwell求解后把力和力矩传递到Motion中Ansys Motion与Maxwell联合仿真工作流程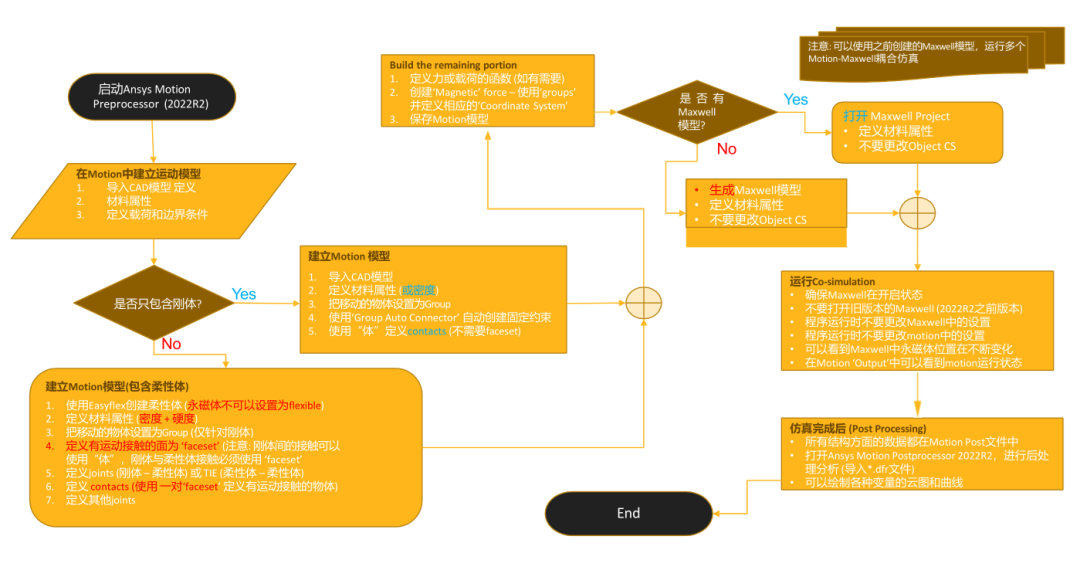
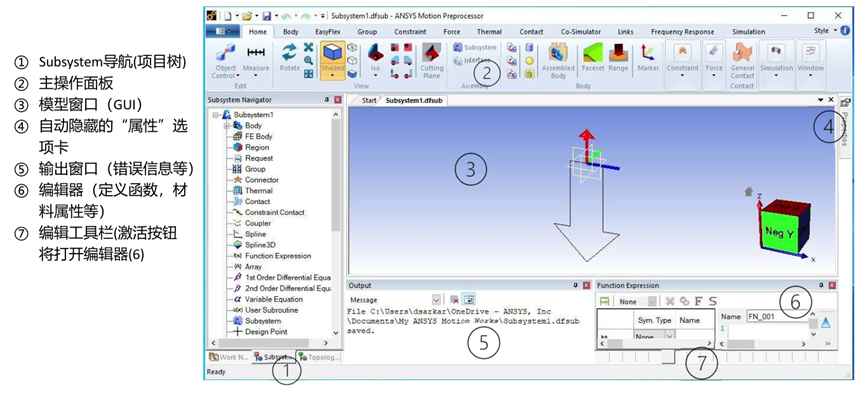
1、启动Ansys Motion Preprocessor 2022R2(Motion的前后处理是分开的软件),在软件左上角选择new→new file2、在弹出的窗口中选择SubSystem,定义文件名和文件保存路径,点击OK• Motion使用3级文件:work-file.dfwork(例如汽车);model-file.dfmodal(例如悬挂系统);subsystem-file.dfsub(例如弹簧)3、在弹出的窗口中选择默认的单位MMKS,点击next设置重力(可以稍后设置)或点击finish显示前处理界面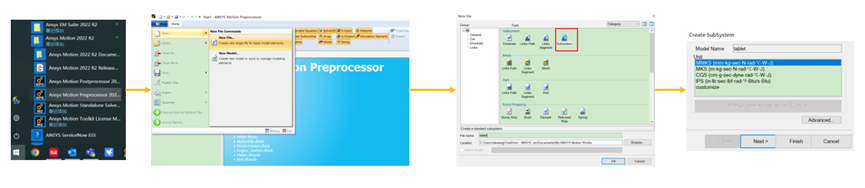
4、在body界面下点击import CAD导入CAD模型5、在弹出的窗口中要导入的模型,motion支持多种CAD格式:ACIS、CATIA、Parasolid、step等6、点击apply,平板电脑和触控笔模型导入到软件中• 右键选择物体,可以更改模型名字、透明度以及隐藏实体7、打开自动隐藏的“属性”选项卡,本案例不考虑重力因素,设置重力为0(XYZ三个方向重力均为0)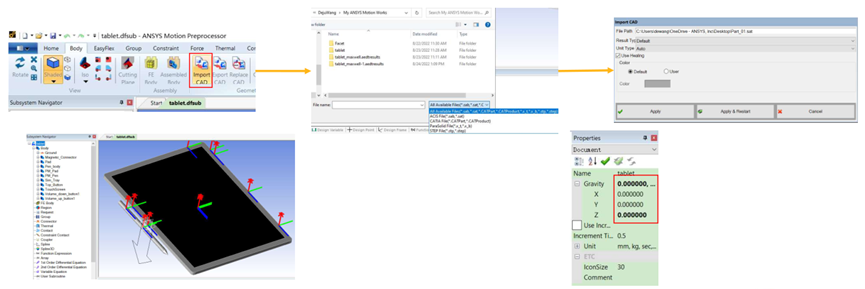
1、点击软件下方material工具栏,在材料属性窗口输入铝的材料属性。输入杨氏模量和泊松比后点击“G”,软件自动计算剪切模量• 对于刚体,只需定义密度;磁性材料的磁特性需在Maxwell中定义2、铝的材料属性输入完成后点击右侧“√”,铝材料添加到软件中。按照同样的步骤添加玻璃材料属性。输入完成后材料列表中共有三个材料:MAT_001(系统自带)、铝和玻璃3、在模型树下右键选择物体,点击property,在弹出的窗口中点击“M”为物体分配材料属性。本例中,两个永磁体按默认材料MAT_001、触摸板定义玻璃材料,其他物体定义铝材料• 对于刚体,可以在此页面直接定义密度,不需要再加载材料属性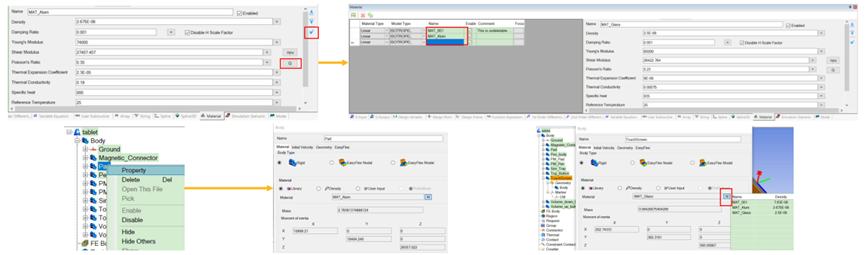
-在模型树下右键选择物体,点击property,在弹出的窗口中可以定义刚体或柔性体。本例中定义触控笔pen_body为柔性体—EasyFlex Nodal• EasyFlex Nodal: 节点柔性体,采用有限元分析,可以考虑非线性行为• EasyFlex Modal:模态柔性体,采用模态叠加法计算,速度快,但只能考虑线性行为-点击EasyFlex界面,软件使用简易的按钮来控制计算精度(类比网格剖分,数值越小计算越精确)。本例选择默认设置3• Seed Point仅用于空心EasyFlex物体,如薄壁盒子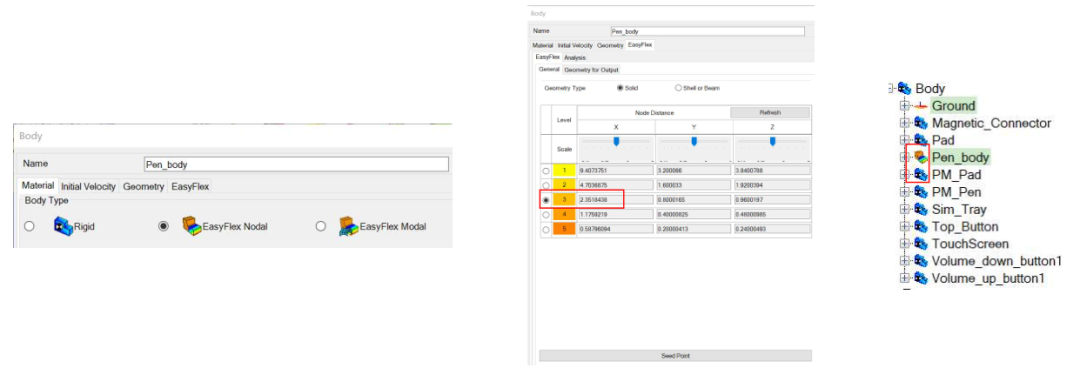
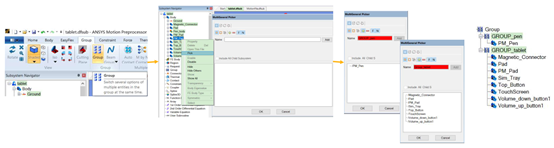
-Group是物体的集/合,group内的物体可以批量设置(比如同时移动),方便用户进行前处理操作-本例中必须定义group,因为在定义magnetic force时不能直接使用“物体” ,只能通过group定义电磁力。定义group另一个好处是使用group auto connector可以自动创建group内的约束-本例中创建两个group,平板电脑和笔(由于pen_body是柔性体,所以group_pen中只包含PM_pen)-在group界面下点击group ,右键选择PM_pen,点击pick,PM_pen出现在物体列表中,点击OK完成group的定义-同样的方法定义包含平板电脑的Group,共八个物体。点击OK,在Group菜单下出现group_pen和group_tabletGroup Auto Connector可以自动地为Group内的物体创建固定约束,方便用户进行前处理操作1、在constraint界面下点击Group Auto Connector,右键选择Group_tablet,点击pick, Group_tablet出现在物体列表中,点击OK完成Group Auto Connector的定义• 在Connector菜单下出现七个固定约束,七个物体分别与pad形成固定约束条件2、在constraint界面下点击Fixed,在弹出的窗口中base entity选择pad,action entity选择Ground,点击Apply,把pad与大地设为固定约束,这样GROUP_tablet内的物体全部与大地形成固定约束条件,在仿真过程中保持静止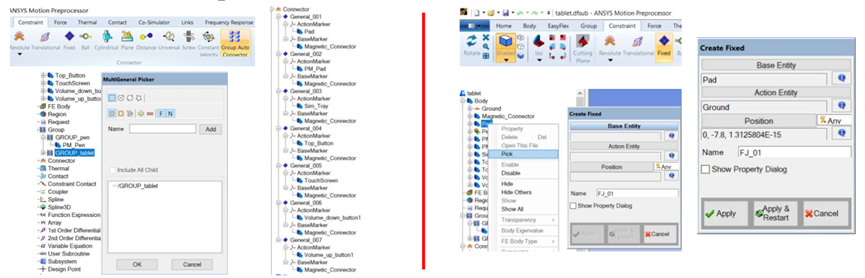
必须为每个可能接触的物体定义Contact。与约束不同,Contact是面相互接触不是体相互接触。刚体之间的接触可以使用物体,但是最好使用“faceset”来定义接触;对于柔性体必须使用“faceset”定义接触。1、在Contact界面下点击Faceset,点击平板电脑与触控笔相邻的平面,Pad/Face(9)出现在弹出的界面列表中,点击OK,在Region菜单下生成FACE_SET012、同样的操作,选择触控笔两个表面,生成FACE_SET02;选择触控笔上表面,生成FACE_SET03;隐藏触控笔,选择触控笔中永磁体一个表面,生成FACE_SET04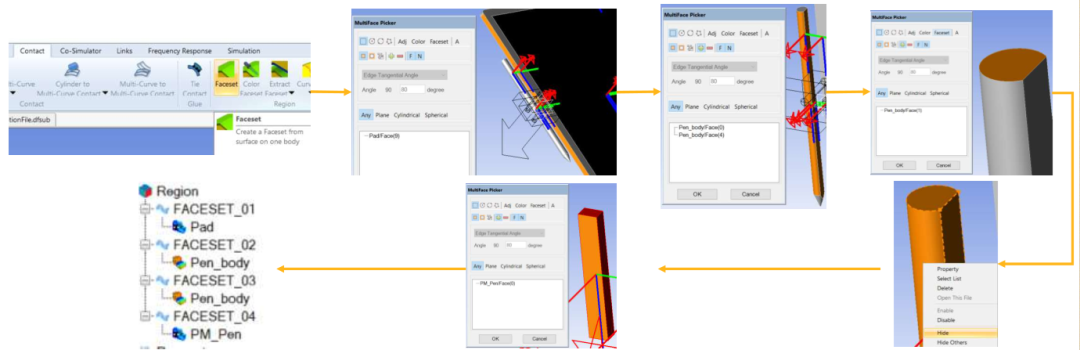
3、双击FACESET_01,在general菜单下勾选Max facet size,并填写0.5。同样的操作,定义另外三个Faceset网格尺寸为0.5。点击Preview,可以看到面网格。定义网格的作用是在物体接触时进行有限元分析。4、pen_body与PM_pen,应该是固定约束关系,由于pen_body是柔性体,必须通过Faceset定义约束条件。依照之前介绍的步骤,定义FACE_SET03和FACE_SET04为固定约束关系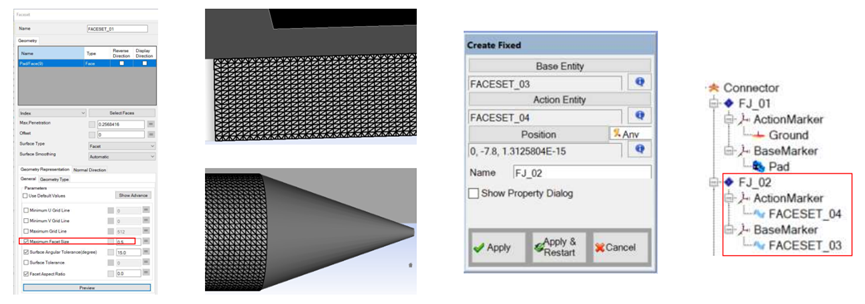
5、在Contact界面下点击General Contact,点击Base Geometry下方空白处,右键点击FACESET_01选择pick,同样的步骤定义FACESET_02为Action Geometry。点击apply,在contact菜单下出现Gcontact_01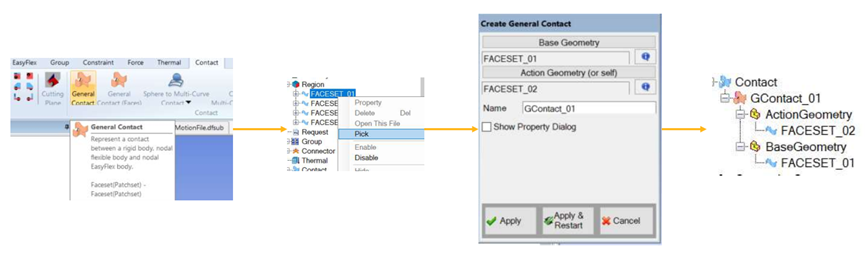
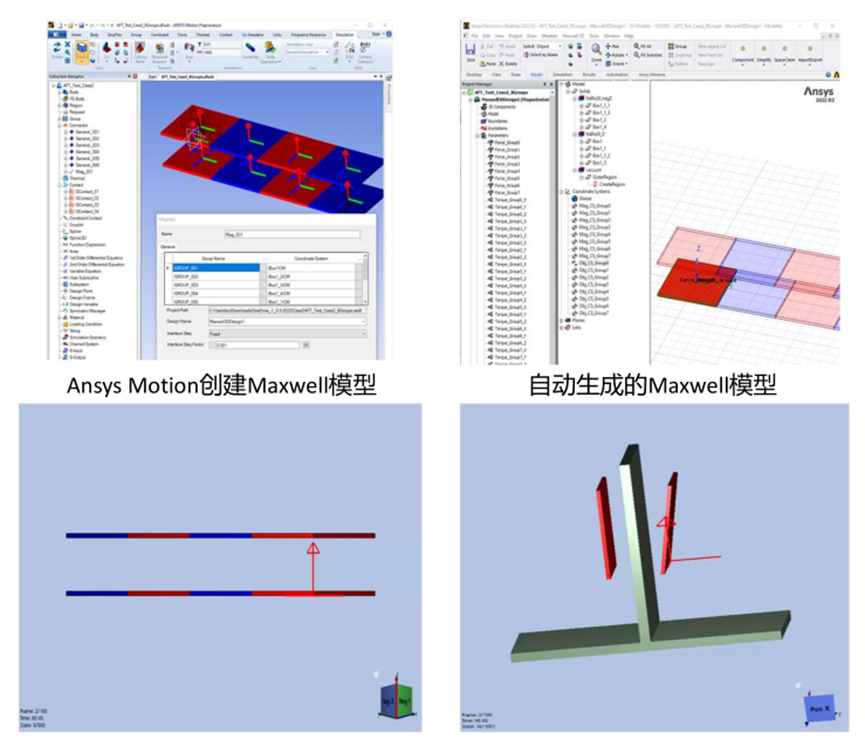
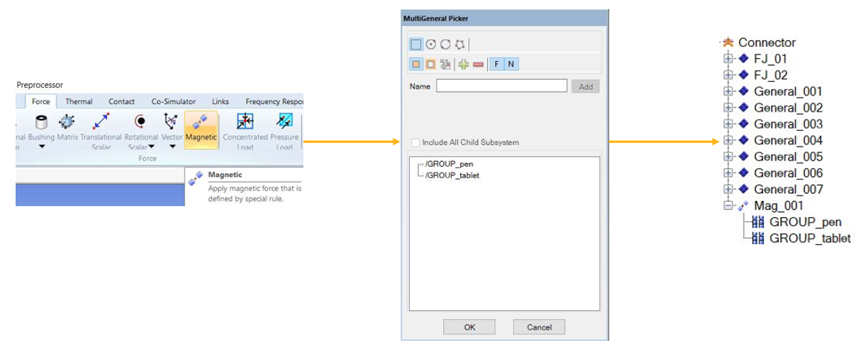
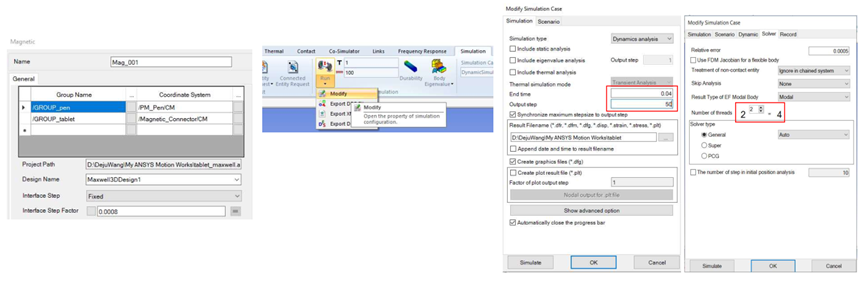
-Motion与Maxwell通过Magnetic功能传递力和力矩数据以及永磁体的位置-在Force界面下点击Magnetic,右键选择GROUP_pen和GROUP_tablet,点击pick,两个GROUP出现在物体列表中,点击OK,在Connector菜单下出现Mag_001电磁力约束• 由于“Magnetic”不能直接调用“物体”,所以只能通过Group定义Magnetic Force-双击Mag_001,设置参数并生成Maxwell project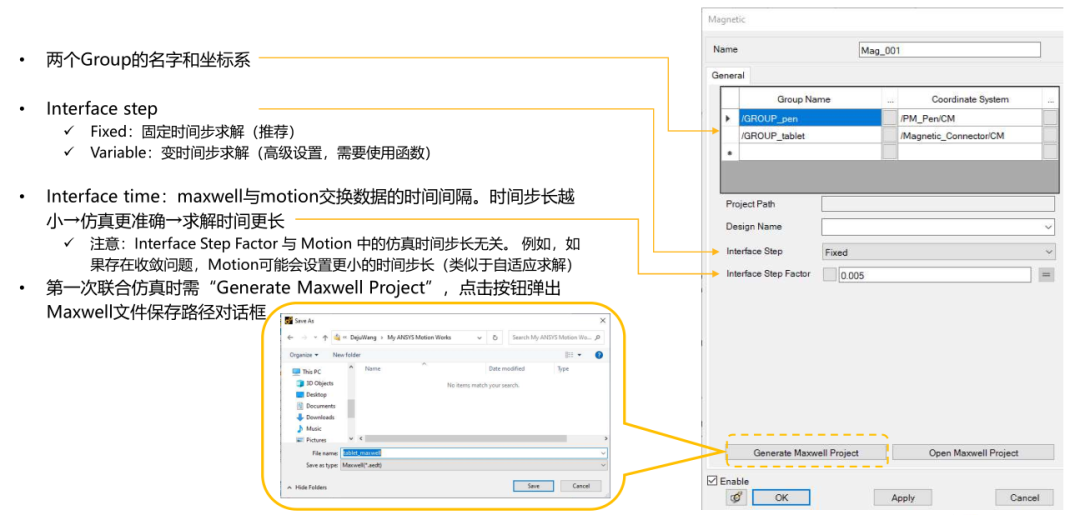
点击Generate Maxwell Project按钮,自动生成Maxwell project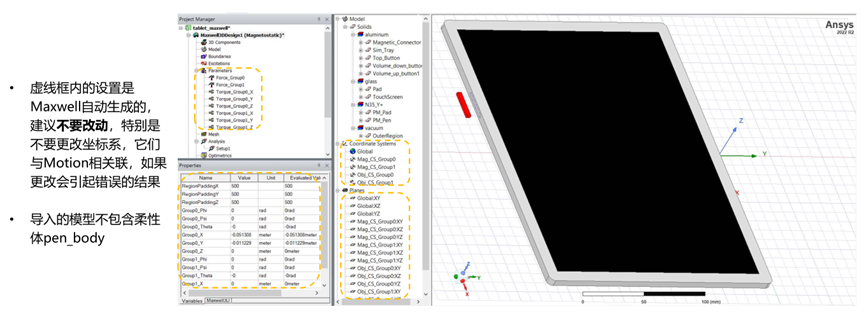
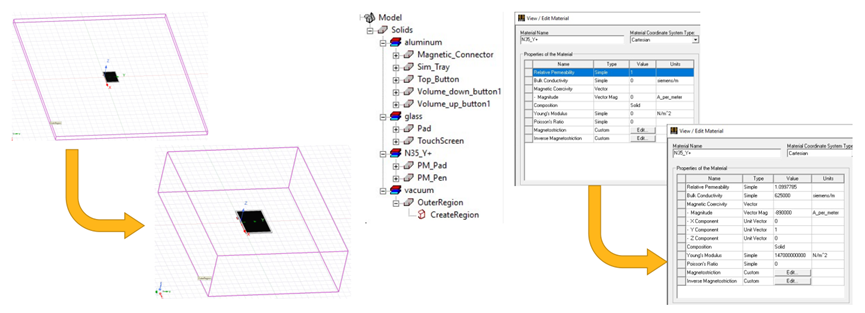
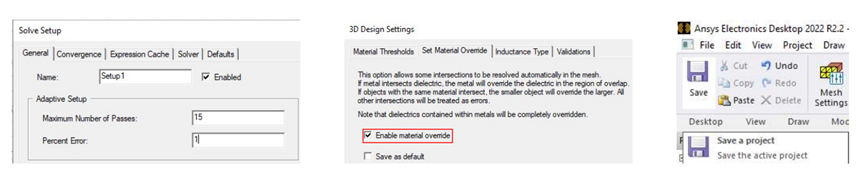
1、更改求解域尺寸。自动生成的模型求解域尺寸为XYZ方向扩展500%,调节求解域尺寸,符合电磁场仿真要求2、定义材料属性。自动生成的模型永磁体的材料属性是空白的,需要用户定义适合的永磁体材料(其他材料也可编辑与更改)3、设置setup。自动生成的模型solve setup的percent error为0.5,本例按照电磁仿真默认的1%即可4、确认是否自动开启enable material override(Maxwell 3D→design setting)6、保存project,不要关闭Maxwell,耦合仿真时需要进行数据交换1、返回到Motion,在Magnetic的Design Name中填写Maxwell的Design名字,点击OK2、在Simulation界面下点击Run→Modify,在弹出的界面中设置求解时间和时间步长。本例设置求解时间0.04s,时间步长50步,如果时间步长过小,可能无法捕捉到接触瞬间电磁力或速度的最大值3、点击solver界面,定义并行求解核数,点击Simulate开始求解Ansys Motion后处理
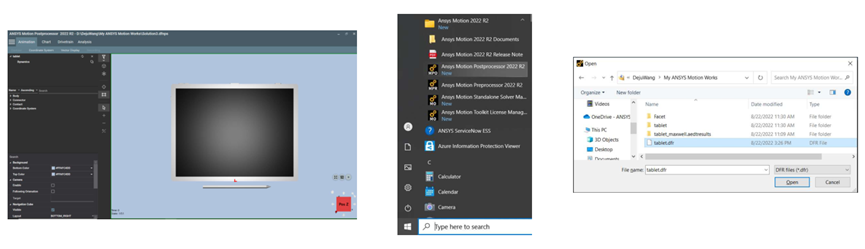
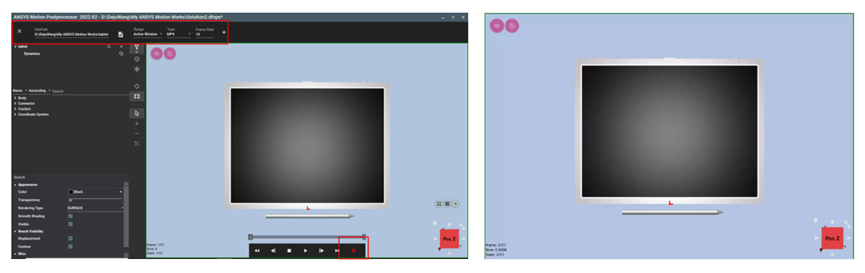
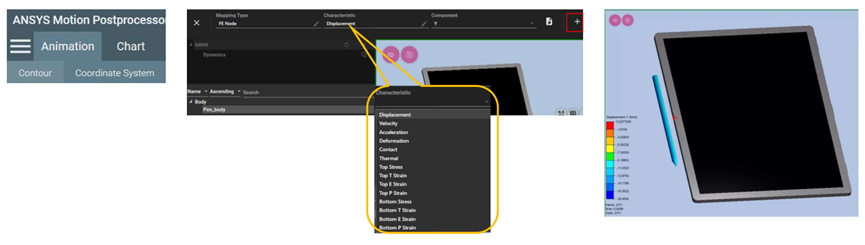
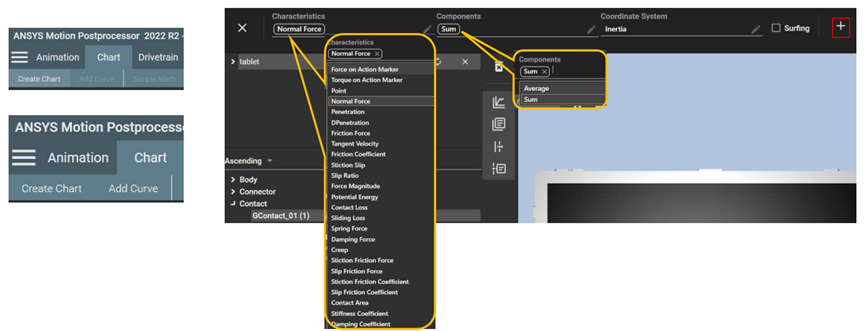
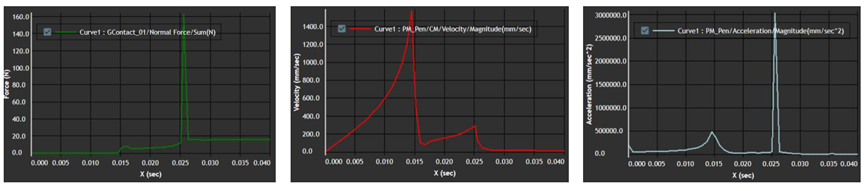
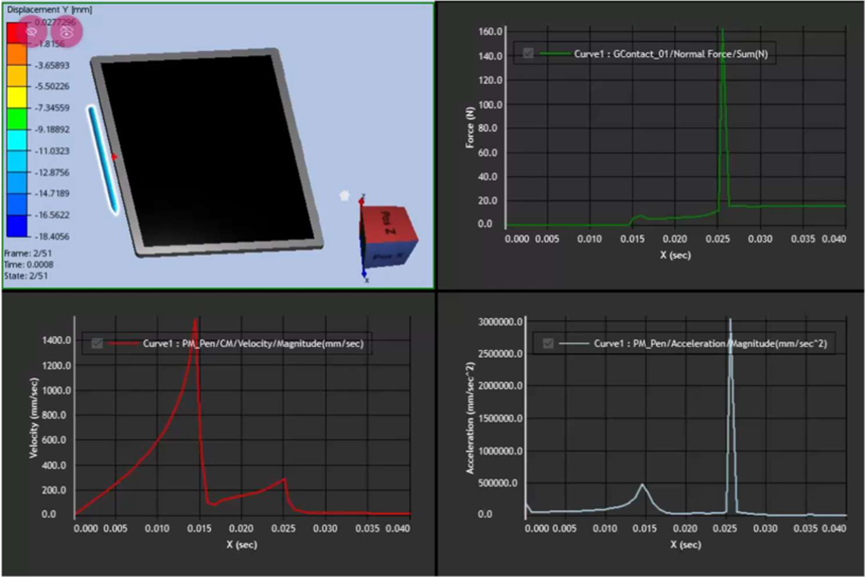
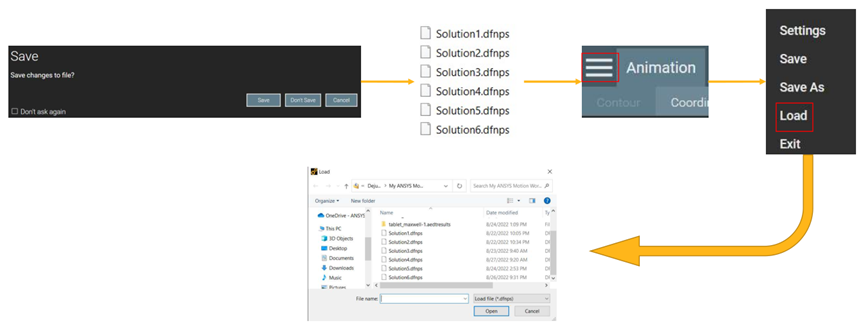
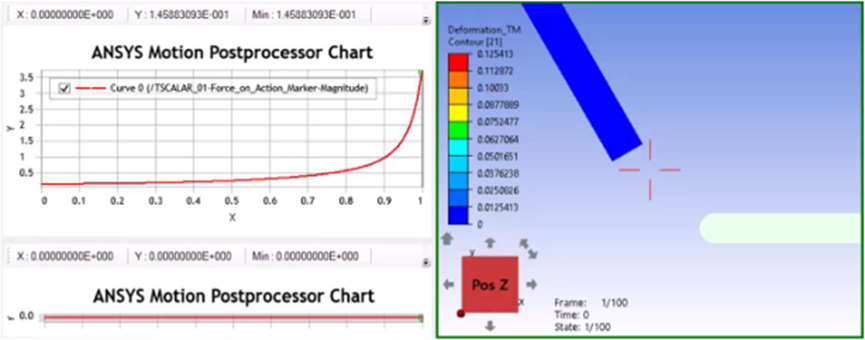
-在求解过程中可以看到迭代次数以及求解时间,在maxwell中可以看到永磁体的位置随着求解时间变化而变化-求解完成后所有文件都存放在之前定义的文件保存路径中-求解完成后Motion post processor自动打开-如果要打开其他后处理文件,点击Ansys Motion Postprocessor 2022R2,在弹出的路径选择对话框中选择*.dfr文件点击模型显示窗口下部的红色录制按钮,编辑软件上方的保存路径、保存格式(MP4或GIF)以及帧频,点击右侧“+”,动画自动保存到设置的路径中点击软件左上角contour,模型列表中只有柔性体pen_body,Mapping type选择FE Node,characteristic选择Displacement(还可以选择其他的物理量),Component选择Y,点击左侧“ ”,绘制触控笔在接触过程中Y方向的形变云图-点击chart→create chart→add curve,模型列表中选择Contact→Gcontact_01, characteristic选择Normal Force(还可以选择其他的物理量),Component选择Sum,点击左侧“ ”,绘制触控笔在接触过程中电磁力曲线-按照同样的方法,选择PM_pen→PM_pen/CM,绘制触控笔在接触过程中的速度与加速度曲线调整形变云图与三个曲线的位置,按照之前的方法保存动画云图和曲线。可以看到触控笔刚接触到pad时,速度达到峰值;而在笔完全接触pad时电磁力和加速度达到峰值-关闭后处理软件,弹出保存结果窗口,点击save,*.dfnps文件(结果文件)自动存放在之前定义的文件保存路径中-如想打开之前的solution文件,点击软件左上角 →load,在弹出的窗口中选择要导入的solution文件不同工况下的仿真对比
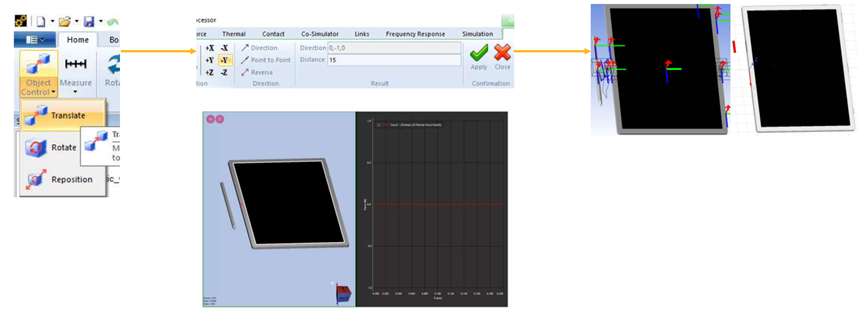
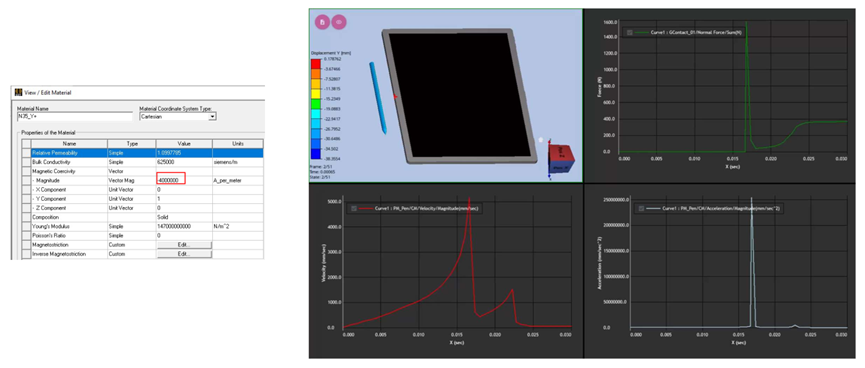
-增加笔与pad之间的距离。在模型列表中选择pen_body,点击home→object control→translate,点击“-Y”并输入15,点击右侧的apply,触控笔沿Y轴负方向移动15mm-Motion与Maxwell中笔与pad增加了距离-由于距离增加,永磁体的磁力不足以吸引触控笔到pad上,电磁力为0-在Maxwell中修改永磁体矫顽力,再次仿真。可以看出增加矫顽力后,在接触过程中,触控笔的形变有大幅增加-更改矫顽力后,绘制触控笔在接触过程中的电磁力、速度与加速曲线。可以看出增加矫顽力后,在接触过程中,电磁力、速度与加速度均有大幅增加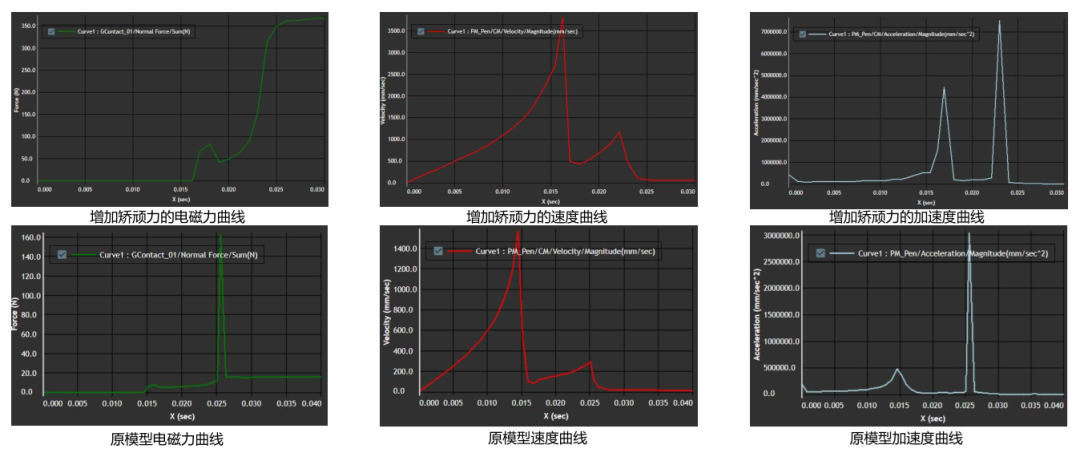
总结
Ansys 为永磁体和磁吸结构的分析提供完整的解决方案。Ansys集成了电磁场仿真、机械运动仿真、多物理场和强大的建模功能,帮助客户优化产品性能。随着电子产品的便捷化、“无线”化,磁吸结构在越来越多的产品中得以应用。该仿真教程广泛适用于各种消费电子产品:笔记本电脑、平板电脑、手机、磁吸键盘、智能保护套等。
深圳市优飞迪科技有限公司成立于2010年,是一家专注于产品开发平台解决方案与物联网技术开发的国家级高新技术企业。
十多年来,优飞迪科技在数字孪生、工业软件尤其仿真技术、物联网技术开发等领域积累了丰富的经验,并在这些领域拥有数十项独立自主的知识产权。同时,优飞迪科技也与国际和国内的主要头部工业软件厂商建立了战略合作关系,能够为客户提供完整的产品开发平台解决方案。
优飞迪科技技术团队实力雄厚,主要成员均来自于国内外顶尖学府、并在相关领域有丰富的工作经验,能为客户提供“全心U 端到端服务”。