预处理共轭梯度法(PCG)与三维有限元分析C++编程实现

摘要: 根据有限元方程和稀疏矩阵的特性,在综合考虑最速下降法(SD)、共轭梯度法(CG)和预处理共轭梯度法(PCG)的优势和局限之后,选择了第三种迭代算法plus——基于PCG的逐个单元法(EBE),对角线预处理(Jacobi)。网格划分和单元刚度的生成,延用直接算法的方案,加载和约束边界条件亦复如是,但是无需组装整体刚度矩阵。 关键词:逐个单元法(EBE),预处理共轭梯度法(PCG),预条件子,对角线预处理(Jacobi),共轭梯度法(CG),最速下降法(SD),迭代法,有限单元法(FEM),C++编程。 |
1. 引言
对于线弹性固体力学的静力平衡问题,经典的有限元计算机程序是基于单元组装技术的。所有单元的刚度矩阵km和荷载向量f分别组装成总刚度矩阵K和总荷载列阵F,得到静力平衡问题的基本方程:
然后通过高斯消元法或各种plus版本,求解线性方程得到总位移向量U,回代得到各单元网格节点的位移和内力等物理量。
那么问题来了:内存溢出怎么办? 随着问题规模的扩大,总刚度矩阵K需要相当大的存储空间。既然直接算法求解线性方程组遇到瓶颈,那就用迭代算法,试试就试试。
本文的网格划分和单元刚度的生成,延用《六面体单元与弹性实体的三维有限元分析C++编程实现》的方案,但是无需组装整体刚度矩阵。对程序算法进行改进,具体做法如下:
新增storkm,以保留各个单元刚度矩阵,无整体刚度组装; 新增迭代相关:计数器cg_iters、次数上限cg_limit、收敛误差cg_tol; 新增PCG相关:对角前置向量diag_precon,参数alpha、beta,向量内积up、kp以及一系列向量; 基于PCG的逐个单元法(EBE)替代原来的直接算法(Cholesky分解); 可视化处理:将三维有限元方程求解前后的数据文件生成EnSight Gold格式。
2. 预处理共轭梯度法(PCG)
2.1 问题描述与等价性
静力平衡问题的有限元基本方程KU=F,可以根据最小势能原理推导得到。系统总势能Π可以表示为应变能和外力势能之和,即:

其中系统总刚度矩阵K为实对称正定矩阵,系统总势能Π可以表示为U的函数,静力平衡状态对应着函数f(U)最小值。
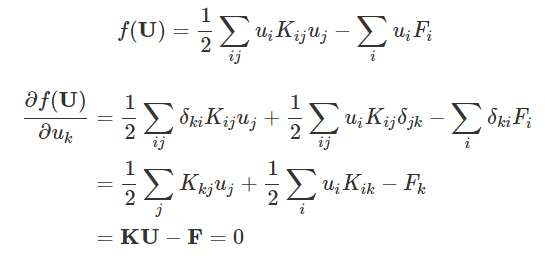
也就是说,求出f值最小的解U*等价于求解线性方程组KU*=F,而函数f(U)梯度表达式:
令函数f(U)梯度为零,存在等价线性系统,如下所示:

函数f(U)可以看做是一个超级碗(开口朝天),碗底最低点就是硅基生物的寻宝目的地。
2.2 为何不用最速下降法(SD)?
想象自己在群山环绕中,如何到达山底?步骤如下:
确定初始位置,找到最陡下降方向; 沿着选定方向一直走到底(不再下降),停下来; 环视一周,找到新的最陡下降方向(拐弯),一直走到底(不再下降),停下来; 重复步骤3,直至到达群山之底。
以上就是最速下降法(Steepest Descent Method,SD)的通俗描述。核心思想是:找到函数在当前位置的梯度,并沿着梯度的反方向移动,迭代收敛到终点位置。翻译成数学语言如下:
最速下降法(SD)求解KU=F的标准流程:
如果梯度的范数小于预设的阈值ε,则停止迭代,输出当前位置Uk; 否则进行第3~5步;
|




看上去似乎很美好:最速下降法(SD)每一步朝当前梯度(最陡的下坡方向)走一小步。
然而,现实很骨感:高维问题中易产生锯齿现象(Zig-zag Path),收敛速度慢,尤其当目标函数的等值线为扁长椭球时。通俗描述为,如果函数的“超级碗”被拉扁了(沿某个方向特别陡,另一个方向特别缓),那么最速下降就会在两条方向之间来回“之”字形游走,不知猴年马月到碗底。
最速下降法(SD)的缺点:当矩阵K的特征值分布跨度很大时,条件数cond(K)增大,最速下降会在各个主轴方向来回“锯齿”逼近,收敛很慢。
有限元方程中的刚度矩阵K为对称正定稀疏矩阵,零元素较多,但非零元分布(如:对角占优程度)直接影响条件数。稀疏矩阵条件数往往过高,由于其收敛性缺陷、计算效率不足以及对稀疏性利用不充分等问题,稀疏矩阵求解线性方程组时较少采用最速下降法。
2.3 共轭梯度法(CG)
简言之,共轭梯度法(Conjugate Gradient Method, CG)就是在一个“扁碗”上找最低点的聪明方法:它每一步不仅沿着梯度走,还保证新方向和旧方向互不“打架”,因此不会来回折返,收敛更快,特别适合大规模、稀疏的线性问题。核心思想:每次的下坡方向,既能去掉当前的“高架”,又不会破坏前面已经“清理干净”的方向。
共轭梯度法(CG)求解KU=F的标准流程:
6. 终止条件: 当残差范数小于预设阈值ε或达到最大迭代次数时,停止迭代,输出近似解Uk; 否则重复第2~5步,直到满足终止条件。 |




2.4 预处理共轭梯度法(PCG)
是否可以进一步改善线性方程组的数值特性,从而加速迭代算法的收敛?
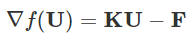
预处理共轭梯度法(Preconditioned Conjugate Gradient, PCG)是一种用于高效求解大型稀疏对称正定线性方程组的迭代算法,通过引入预条件子改善系数矩阵的条件数,显著提升收敛速度。其核心机制是降低条件数和集中 特征值分布。用数学语言表述为:
对于线性方程组KU=F,当原始系数矩阵K的条件数cond(K)过大时,共轭梯度法(CG)收敛缓慢,此时构造预条件子M,将方程组转化为:

最理想的情况是条件数接近1,收敛速度接近直接解法:
预处理共轭梯度法(PCG)求解KU=F的标准流程:
3. 更新→解向量和残差
4. 计算共轭方向系数βk:
5. 生成新的搜索方向Pk+1:
|




预条件子M需满足两大条件:高效可求逆和近似原系数逆阵。
当线性系统的系数矩阵,满足“对称正定稀疏矩阵、可获得良好预条件”的前提下,预处理共轭梯度法(PCG)往往是首选。
常见的预条件子类型、构造方式及效果如下:
| 预条件子类型 | 构造方式 | 收敛提升效果 |
|---|---|---|
| 对角线预处理 | M = diag(K) | |
| 不完全Cholesky分解 | M = LLT | |
| 对称逐次超松弛 | M = (D+ωL)D-1(D+ωL)T |
不只是Jacobi、IC、SSOR这些分解式预条件有助于压缩系数矩阵的谱分布,还可以采取更进一步的优化措施:
重启策略:对于长迭代或数值误差积累,可每隔一定步数重新设置残差与搜索方向,以清除漂移。
并行化与稀疏存储:利用SciPy的并行BLAS或GPU加速矩阵-向量乘,提高运算吞吐。
多重网格:将CG嵌入多重网格框架(MGCG),在不同尺度上加速收敛。
3. 逐个单元法(EBE)
从共轭梯度法(CG)的标准流程可以看出:
CG算法仅涉及到一些简单的向量操作,例如,向量内积、向量加减、向量与标量的乘除;唯一涉及到矩阵的,是刚度矩阵K与搜索方向向量P的点乘。由于P是已知向量,KP可以按单元一个接一个地执行(逐个单元法),根本就不需要组装总刚度矩阵K,完美避开了高斯消元法等直接法的庞大开销。也就是说:
其中,nels是单元数,ki是第i个单元的单元刚度矩阵,pi是P相应于第i个单元的部分。
从预处理共轭梯度法(PCG)的标准流程可以看出:
PCG算法(相对于CG)采取优化措施以加速收敛,也就是预条件子M改善原有的系数矩阵K,使得新构造出的系数矩阵M-1K的条件数减少,条件数接近1为最佳喔。预条件子M应该是易于求逆的,否则就没什么用;或者是易于求解预处理线性方程组,如下:
通过求解以上方程组,得到预处理残差Z,由此看出:

如果能够显著加快收敛的速度,那么额外付出的预处理工作量是值得的。这就看预条件子M的表现。常见的3种预条件子M——对角线预处理(Jacobi)、不完全Cholesky分解(IC)、对称逐次超松弛(SSOR),具体表现如下:
Jacobi预处理:内存占用低,并行扩展性强。至于收敛速度,对于系数矩阵对角占优的问题是极好的;但是对于其他实对称正定矩阵,表现得中规中矩,比没有强。 IC预处理:内存占用大大降低,并行扩展性还不错,这两点表现不如Jacobi预处理。但是收敛速度大大加快,尤其是系数矩阵为非对角占优的情况,表现极为强势,碾压Jacobi预处理。 SSOR预处理:文献[2]将其ω=1的特例,也就是高斯-赛德尔(Gauss-Seidel)预条件子,与雅可比(Jacobi)预条件子做对比,两种方法都能有效加快收敛速度,Gauss-Seidel更胜一筹。实际上SSOR预处理的表现,依赖参数ω。内存占用和并行扩展方面,不如Jacobi预处理。
基于PCG的逐个单元法(EBE):
逐个单元法,顾名思义Element-by-Element Method(简称EBE)。
核心思想:避免总刚度矩阵的组装。在迭代过程中直接利用单元刚度矩阵km计算局部贡献,通过向量累加更新全局解,避免存储大型稀疏矩阵。至于预处理的方式:
Jacobi预条件子是最简单的; 利用单元矩阵的不完备Cholesky分解,构造总刚度阵的近似,形成预条件矩阵; 文献[2]注意到SSOR预条件子也可以定义为下三角矩阵和上三角矩阵的乘积,通过两次回代可以求解预处理线性方程组,得到预处理残差。这和IC预处理有相似之处。
本文将采取Jacobi预条件子:
可以看出,M是K的对角线矩阵,M的逆阵是对角线元素的倒数。无需组装总刚度矩阵,就能轻松获取。接下来就是见证奇迹的时刻。
4. 程序设计C++
4.1 网格生成与后处理
对于简单规则的几何体:自定义函数/子程序生成三维网格
对于复杂的几何体,更普遍的做法:借助前处理软件/工具生成网格,然后直接读入各节点坐标、各单元节点编号、荷载和边界条件等信息。
后处理步骤:自定义函数/子程序生成EnSight Gold文件
通过mesh_ensi()和dis msh_ensi()提取数据,生成一系列EnSight Gold文件; 利用可视化工具ParaView查看EnSight Gold文件,进行FEM后处理。
4.2. 主程序流程图及C++源码
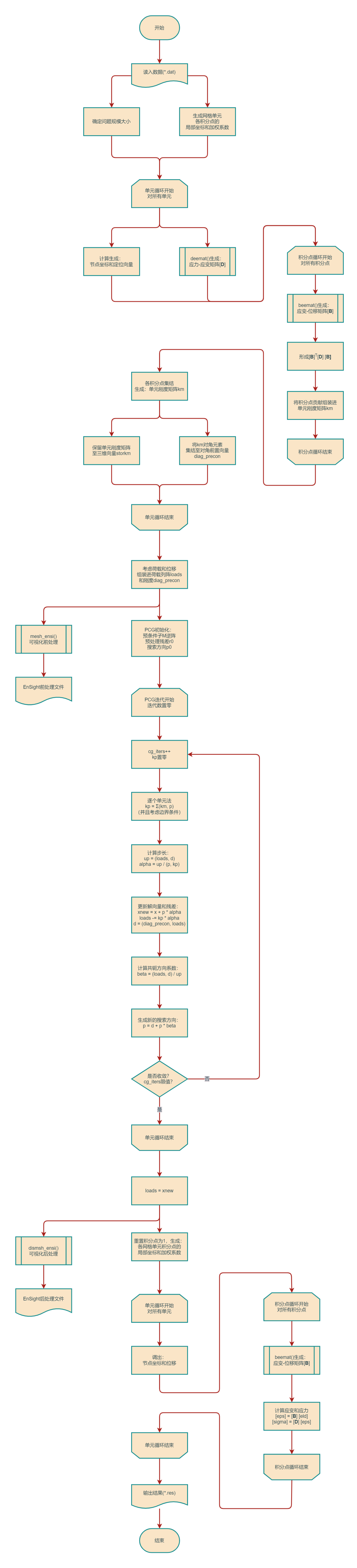
图1:主程序流程图
//===================================================================//Program No.13 Diagonally preconditioned conjugate gradient solver.// 3D strain of an elastic solid using brick hexahedra.// No global stiffness matrix assembly.//===================================================================using namespace std;int main() {int cg_iters;//PCG迭代计数器int cg_limit;//PCG迭代上限int fixed_freedoms;//固定位移数int loaded_nodes;//受载节点数int ndim = 3;//维数int ndof;//单元自由度int nels;//单元数int neq;//网格自由度int nip;//单元积分节点数int nn;//节点数int nod;//单元节点数int nodof = 3;//节点自由度int nprops = 2;//材料特性数int np_types;//材料类型数int nr;//约束节点数int nst = 6;//应力(应变)项数目int nxe, nye, nze;//x、y、z向单元数double alpha, beta;//PCG参数double cg_tol;//PCG收敛误差double det;//雅可比矩阵行列式double penalty = 1.0e20; //罚因子double up;//PCG向量内积string element = "hexahedron";//单元类型 = 六面体string fin_name, fout_name;//读入文件名,写出文件名pair<string, string> argv;//文件名返回值bool cg_converged = false;//PCG是否收敛//========================= input and initialisation =========================argv = getname();fin_name = argv.first;ifstream fin(fin_name, ios::in);fout_name = argv.second;ofstream fout(fout_name, ios::out);fin >> nod >> nxe >> nye >> nze >> nip;//从文件读入:单元节点数,x/y/z向单元数,单元积分节点数fin >> cg_tol >> cg_limit >> np_types;//从文件读入:PCG收敛误差与迭代上限,材料类型数auto result0 = mesh_size(element, nod, nxe, nye, nze);//生成:单元数,节点数nels = result0.first;nn = result0.second;ndof = nod * nodof;//单元自由度vector<double> eld(ndof);//单元节点位移(单元自由度)vector<double> eps(nst);//应变项(应力/应变项数目)vector<int> etype(nels, 1);//单元特性类型向量(单元数)vector<double> fun(nod);//形函数(单元节点数)vector<int> g(ndof);//单元定位向量(单元自由度)vector<double> gc(ndim);//积分点坐标(维数)vector<int> num(nod);//单元节点编号向量(单元节点数)vector<double> sigma(nst);//应力项(应力/应变项数)vector<double> weights(nip);//数值积分加权系数(单元积分节点数)vector<double> x_coords(nxe + 1);//网格排列的x方向坐标(单元行数 + 1)vector<double> y_coords(nye + 1);//网格排列的y方向坐标(单元行数 + 1)vector<double> z_coords(nze + 1);//网格排列的z方向坐标(单元行数 + 1)vector<vector<double> > bee(nst, vector<double>(ndof));//应变-位移矩阵(应力/应变项数, 单元自由度)vector<vector<double> > coord(nod, vector<double>(ndim));//单元节点坐标(单元节点数, 维数)vector<vector<double> > dee(nst, vector<double>(nst));//应力-应变矩阵(应力/应变项数, 应力/应变项数)vector<vector<double> > der(nod, vector<double>(ndim));//局部坐标下形函数的偏导数(单元节点数, 维数)vector<vector<double> > deriv(nod, vector<double>(ndim));//整体坐标下形函数的偏导数(单元节点数, 维数)vector<vector<double> > g_coord(nn, vector<double>(ndim));//所有单元的节点坐标(节点数, 维数)vector<vector<int> > g_g(nels, vector<int>(ndof));//总单元定位矩阵(单元数,单元自由度)vector<vector<int> > g_num(nels, vector<int>(nod));//总单元节点编号矩阵(单元数, 单元节点数)vector<vector<double> > jac(ndim, vector<double>(ndim));//雅可比矩阵(维数, 维数)vector<vector<double> > km(ndof, vector<double>(ndof));//单元刚度矩阵(单元自由度, 单元自由度)vector<vector<int> > nf(nn, vector<int>(nodof, 1));//节点自由度矩阵(节点数,节点自由度)vector<vector<double> > points(nip, vector<double>(ndim));//单元积分点坐标(单元的积分点数, 维数)vector<vector<double> > prop(np_types, vector<double>(nprops));//单元特征矩阵(材料类型数, 材料特性数)vector<vector<vector<double> > > storkm(nels, vector<vector<double> >(ndof, vector<double>(ndof))); //保留单元刚度矩阵(单元数, 单元自由度, 单元自由度)for (int i = 0; i < np_types; i++) {//从文件中读入:单元特征矩阵for (int j = 0; j < nprops; j++)fin >> prop[i][j];}if (np_types > 1) {//从文件中读入:单元特性类型向量for (int i = 0; i < nels; i++)fin >> etype[i];}for (int i = 0; i <= nxe; i++)//从文件中读入:网格排列的x方向坐标fin >> x_coords[i];for (int i = 0; i <= nye; i++) //从文件中读入:网格排列的y方向坐标fin >> y_coords[i];for (int i = 0; i <= nze; i++)//从文件中读入:网格排列的z方向坐标fin >> z_coords[i];fin >> nr;//从文件中读入:约束节点数vector<int> k1(nr);//约束节点编号向量(约束节点数)if (nr > 0) {for (int i = 0; i < nr; i++) {//从文件中读入:约束节点编号及自由度fin >> k1[i];for (int j = 0; j < nodof; j++) {int m = k1[i] - 1;fin >> nf[m][j];}}}auto result1 = formnf(nf);neq = result1.first;//返回:网格自由度数目nf = result1.second;//生成:节点自由度矩阵fout << " There are " << neq << " equations." << endl;cout << " There are " << neq << " equations." << endl;vector<double> d(neq);//前置rhs向量(网格自由度)vector<double> diag_precon(neq, 1.0);//对角前置向量(网格自由度)vector<double> loads(neq);//总体荷载/位移向量(网格自由度)vector<double> r(neq);//PCG“残差”向量(网格自由度)vector<double> p(neq);//PCG“下降”向量(网格自由度)vector<double> kp(neq);//PCG“迭代值”向量(网格自由度)vector<double> x(neq), xnew(neq);//PCG“老”和“新”求解向量(网格自由度)auto result2 = sample(element, nip, ndim);points = result2.first; //生成:单元积分点坐标weights = result2.second; //生成:加权系数//======== element stiffness integration, storage and preconditioner =========for (int i = 0; i < nels; i++) {int m = etype[i] - 1;dee = deemat(prop[m][0], prop[m][1], nst);//生成:应力-应变矩阵[D]auto result3 = hexahedron_xz(i, nod, x_coords, y_coords, z_coords);coord = result3.first;//生成:单元节点坐标矩阵num = result3.second;//生成:单元节点编号向量g = num_to_g(num, nf);//生成:单元定位向量g_num[i] = num;//第i个单元的节点编号向量for (int j = 0; j < nod; j++) {int k = num[j] - 1;g_coord[k] = coord[j]; //第i个单元的节点坐标矩阵}g_g[i] = g;//第i个单元的定位向量fill(km.begin(), km.end(), vector<double>(ndof, 0.0));vector<vector<double> > btdb(ndof, vector<double>(ndof, 0.0));for (int ii = 0; ii < nip; ii++) {der = shape_der(ii, nod, points);//生成:局部坐标下形函数的偏导数jac = matmul(transpose(der), coord); //生成:雅可比矩阵det = determinant(jac);//生成:雅可比矩阵行列式jac = invert(jac);//生成:雅可比矩阵的逆deriv = matmul(der, jac);//生成:整体坐标下形函数的偏导数bee = beemat(nst, ndof, deriv);//生成:应变-位移矩阵[B]btdb = matmul(matmul(transpose(bee), dee), bee);for (int jj = 0; jj < ndof; jj++) {for (int kk = 0; kk < ndof; kk++)btdb[jj][kk] *= det * weights[ii];}for (int jj = 0; jj < ndof; jj++) {for (int kk = 0; kk < ndof; kk++)km[jj][kk] += btdb[jj][kk];}//生成:单元刚度矩阵}storkm[i] = km;//第i个单元的刚度矩阵for (int k = 0; k < ndof; k++) {if (g[k]) {int m = g[k] - 1;diag_precon[m] += km[k][k];//生成:对角前置向量}}}//============= invert the preconditioner and get starting loads =============fin >> loaded_nodes;//从文件读入:受载节点数vector<int> k2(loaded_nodes);//初始化:受载节点编号向量if (loaded_nodes) {//从文件读入:受载节点编号,相应荷载向量for (int i = 0; i < loaded_nodes; i++) {fin >> k2[i];int m1 = k2[i] - 1;for (int j = 0; j < nodof; j++) {if (nf[m1][j]) {int m2 = nf[m1][j] - 1;fin >> loads[m2];}elsefin.ignore(5);}}}fin >> fixed_freedoms;//从文件读入:固定位移的数量vector<int> node(fixed_freedoms);//固定节点向量vector<int> no(fixed_freedoms);//固定自由度编号向量vector<int> sense(fixed_freedoms);//固定自由度的检测向量vector<double> value(fixed_freedoms);//固定位移向量vector<double> store(fixed_freedoms);//储存增广对角项if (fixed_freedoms) {for (int i = 0; i < fixed_freedoms; i++) {fin >> node[i] >> sense[i] >> value[i];int j = node[i] - 1;int k = sense[i] - 1;no[i] = nf[j][k];int m = no[i] - 1;diag_precon[m] += penalty;loads[m] = diag_precon[m] * value[i];store[i] = diag_precon[m];}}//生成:前处理Ensight Gold格式文件,该格式文件可以使用ParaView查看mesh_ensi(fin_name, g_coord, g_num, element, etype, nf, loads, 1, 1, 0.0, true);//PCG初始化:预条件子M逆阵, 预处理残差r0, 搜索方向p0for (int i = 0; i < neq; i++) {diag_precon[i] = 1.0 / diag_precon[i];d[i] = diag_precon[i] * loads[i];p[i] = d[i];}//========================== PCG equation solutions ==========================cg_iters = 0;fill(x.begin(), x.end(), 0.0);while (!cg_converged && cg_iters != cg_limit) {cg_iters++;fill(kp.begin(), kp.end(), 0.0);//逐个单元法 kp = Σki·pifor (int i = 0; i < nels; i++) {g = g_g[i];km = storkm[i];for (int j = 0; j < ndof; j++) {if (g[j]) {int m1 = g[j] - 1;for (int k = 0; k < ndof; k++) {if (g[k]) {int m2 = g[k] - 1;kp[m1] += km[j][k] * p[m2];}}}}}if (fixed_freedoms) {for (int i = 0; i < fixed_freedoms; i++) {int m = no[i] - 1;kp[m] = p[m] * store[i];}}//PCG迭代流程up = matmul(loads, d);alpha = up / matmul(p, kp);for (int i = 0; i < neq; i++) {xnew[i] = x[i] + p[i] * alpha;loads[i] -= kp[i] * alpha;d[i] = diag_precon[i] * loads[i];}beta = matmul(loads, d) / up;for (int i = 0; i < neq; i++) {p[i] = d[i] + p[i] * beta;}//PCG是否终止?auto result4 = checon(xnew, x, cg_tol);cg_converged = result4.first;x = result4.second;}fout << " Number of cg iterations to convergence was " << cg_iters << endl;cout << " Number of cg iterations to convergence was " << cg_iters << endl;fout << endl << " Node x-disp y-disp z-disp" << endl;cout << endl << " Node x-disp y-disp z-disp" << endl;loads = xnew;for (int i = 0; i < nn; i++) {fout << setw(4) << i + 1;cout << setw(4) << i + 1;for (int j = 0; j < nodof; j++) {if (nf[i][j]) {int k = nf[i][j] - 1;fout << setw(14) << scientific << setprecision(4) << loads[k];cout << setw(14) << scientific << setprecision(4) << loads[k];}else {fout << " 0.0000e+00";cout << " 0.0000e+00";}}fout << endl;cout << endl;}//生成:后处理Ensight Gold格式文件,该格式文件可以使用ParaView查看dis msh_ensi(fin_name, 1, nf, xnew);//================ recover stresses at nip integrating points ================nip = 1;points.resize(nip, vector<double>(ndim));weights.resize(nip);auto result4 = sample(element, nip, ndim);points = result4.first;//生成:单元积分点坐标weights = result4.second;//生成:加权系数fout << endl << " The integration point (nip=" << nip << ") stresses are:" << endl;cout << endl << " The integration point (nip=" << nip << ") stresses are:" << endl;fout << " Element x-coord sig_x tau_xy" << endl;cout << " Element x-coord sig_x tau_xy" << endl;fout << " y-coord sig_y tau_yz" << endl;cout << " y-coord sig_y tau_yz" << endl;fout << " z-coord sig_z tau_zx" << endl;cout << " z-coord sig_z tau_zx" << endl;for (int i = 0; i < nels; i++) {fout << setw(4) << i + 1;cout << setw(4) << i + 1;if (np_types > 1) {int m = etype[i] - 1;dee = deemat(prop[m][0], prop[m][1], nst);}//生成:应力-应变矩阵[D]elsedee = deemat(prop[0][0], prop[0][1], nst);num = g_num[i];//生成:第i个单元的节点编号向量for (int j = 0; j < nod; j++) {int k = num[j] - 1;coord[j] = g_coord[k]; //生成:第i个单元的节点坐标矩阵}g = g_g[i];//生成:第i个单元的定位向量for (int k = 0; k < ndof; k++) {if (g[k]) {int m = g[k] - 1;eld[k] = loads[m];//生成:第i个单元的位移向量}elseeld[k] = 0.0;}for (int ii = 0; ii < nip; ii++) {fun = shape_fun(ii, nod, points);//生成:形函数der = shape_der(ii, nod, points);//生成:局部坐标下形函数的偏导数gc = matmul(fun, coord);//生成:积分点坐标jac = matmul(transpose(der), coord); //生成:雅可比矩阵jac = invert(jac);//生成:雅可比矩阵的逆deriv = matmul(der, jac);//生成:整体坐标下形函数的偏导数bee = beemat(nst, ndof, deriv);//生成:应变-位移矩阵[B]eps = matmul(bee, eld);//生成:单元应变向量sigma = matmul(dee, eps);//生成:单元应力向量fout << setw(14) << scientific << setprecision(4) << gc[0]<< setw(14) << scientific << setprecision(4) << sigma[0]<< setw(14) << scientific << setprecision(4) << sigma[3] << endl;cout << setw(14) << scientific << setprecision(4) << gc[0]<< setw(14) << scientific << setprecision(4) << sigma[0]<< setw(14) << scientific << setprecision(4) << sigma[3] << endl;fout << " " << setw(14) << scientific << setprecision(4) << gc[1]<< setw(14) << scientific << setprecision(4) << sigma[1]<< setw(14) << scientific << setprecision(4) << sigma[4] << endl;cout << " " << setw(14) << scientific << setprecision(4) << gc[1]<< setw(14) << scientific << setprecision(4) << sigma[1]<< setw(14) << scientific << setprecision(4) << sigma[4] << endl;fout << " " << setw(14) << scientific << setprecision(4) << gc[2]<< setw(14) << scientific << setprecision(4) << sigma[2]<< setw(14) << scientific << setprecision(4) << sigma[5] << endl;cout << " " << setw(14) << scientific << setprecision(4) << gc[2]<< setw(14) << scientific << setprecision(4) << sigma[2]<< setw(14) << scientific << setprecision(4) << sigma[5] << endl;}}}
主程序可用于三维有限元静力分析,六面体单元(网格),考虑外加荷载和边界条件。涉及到的子程序/函数有8类:
高斯积分法与形函数:sample(),shape_fun(),shape_der(); 单元刚度矩阵:beemat(),deemat(); 单元定位:num_to_g(),formnf(); 网格生成:mesh_size(),hexahedron_xz(); 文件流与命名:getname(); 矩阵计算:transpose(),matmul(),determinant(),invert(); 迭代收敛判断:checon(); 前后处理可视化:mesh_ensi(),dis msh_ensi()。
第1~2类子程序/函数源码可参照以下4篇文章:
第3~5类子程序/函数源码可参照以下1篇文章:
第6类子程序/函数源码可参照以下1篇文章:
第7类子程序/函数源码可参照以下1篇文章:
第8类子程序/函数源码可参照以下4篇文章:
特别提示:CG子程序/函数源码可参照以下4篇文章:
5. 数值案例
5.1. 案例一:立方弹性实体
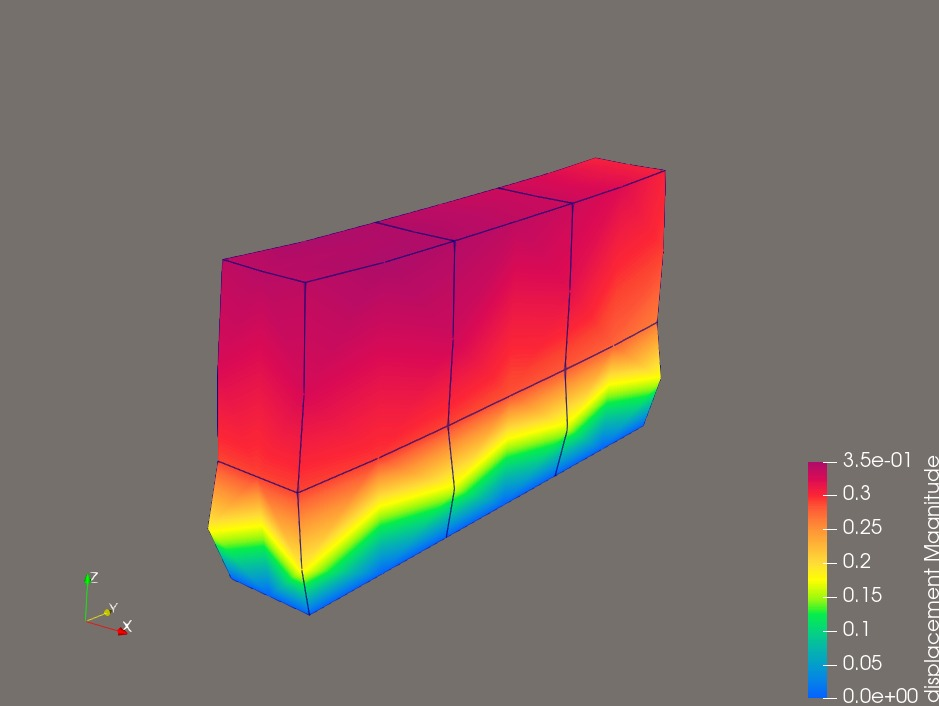
图2:位移云图-立方弹性实体-考虑重力荷载
上图的“大西瓜”是不是很好吃啊?该案例曾经在《考虑重力荷载的二维/三维有限元分析C++编程实现》详细讨论过,当时采用直接算法(Cholesky分解)求解有限元方程。
这次改用PCG迭代算法,也就是Jacobi预处理的逐个单元法(EBE)。网格划分和其他数据输入,均沿用上次直接算法的方案和信息。PCG迭代次数上限和收敛容差,分别赋值为200和1.0e-5。
理论上最多124次迭代即可收敛,实际上61次迭代(无预处理增加至73次),得到较为满意的计算结果,和直接算法几乎是一模一样,精确啊。所以,这里就不再展示结果数据和云图了,反正都一样。
随着问题规模的扩大,迭代法相对于直接法的优势更显著,但也有其适用条件。请看↓↓下一个案例↓↓
5.2. 案例二:悬臂钢梁
求出下图所示的悬臂钢梁在角点处的挠度。
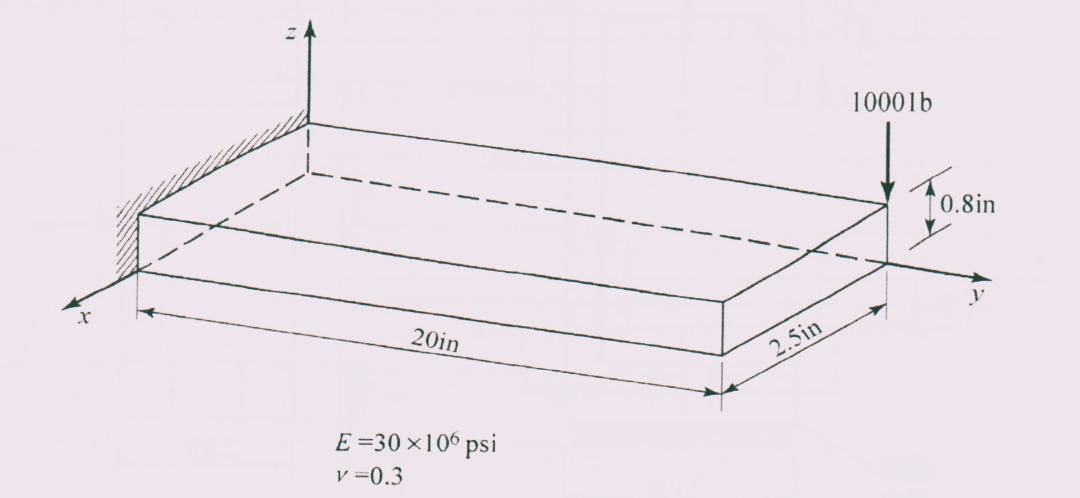
图3:悬臂钢梁
本案例曾经在《六面体单元与弹性实体的三维有限元分析C++编程实现》闪亮登场。
这次沿用其网格划分方式:采用20节点六面体缩减积分单元来划分网格,各单元/网格尺寸不大于1.0in,x、y、z方向的单元数分别为3、20、1。固定端18个节点3个维度的自由度均为0,自由端角点承受集中荷载1000lb竖直向下。
将PCG迭代次数上限赋值为2000(本案例理论值是1560);将PCG收敛容差赋值为1.0e-10,由于直接法求得解向量的数量级从1.0e-2到1.0e-15跨越较大,在计算开销和结果精度之间综合考虑性价比。输入数据*.dat文件的相关内容如下:
==================================
数值案例:悬臂钢梁结构的数据输入
==================================
单元节点数nod
20
各方向单元数nxe/nye/nze
3 20 1
单元积分节点数nip
8
PCG收敛误差/迭代上限
1.0e-10 2000
材料类型数np_types
单元特征值prop(弹性模量e, 泊松比v)
1
3.0e7 0.3
单元特性类型etype(不需要not needed)
网格布置的x向坐标x_coords
0.0 0.8333 1.6667 2.5
网格布置的y向坐标y_coords
0.0 1.0 2.0 3.0 4.0 5.0 6.0
7.0 8.0 9.0 10.0 11.0 12.0 13.0
14.0 15.0 16.0 17.0 18.0 19.0 20.0
网格布置的z向坐标z_coords
0.0 -0.8
约束节点数nr
约束节点编号k1与相应的自由度nf
18
521 0 0 0 522 0 0 0 523 0 0 0 524 0 0 0 525 0 0 0 526 0 0 0
527 0 0 0 528 0 0 0 529 0 0 0 530 0 0 0 531 0 0 0 532 0 0 0
533 0 0 0 534 0 0 0 535 0 0 0 536 0 0 0 537 0 0 0 538 0 0 0
受载节点数loaded_nodes
受载节点编号k2与相应的荷载loads
1
7 0.0 0.0 -1000.0
给定位移数fixed_freedoms
0
采用本文程序读入*.dat文件,得到计算结果*.res如下。
===============================================
数值案例:悬臂钢梁结构的节点位移和单元应力
===============================================
There are 1560 equations.
Number of pcg iterations to convergence was 1117.
Node x-disp y-disp z-disp
1 2.3545e-03 -2.4607e-02 -8.1387e-01
2 2.3695e-03 -2.4628e-02 -8.1634e-01
3 2.3927e-03 -2.4664e-02 -8.1887e-01
4 2.3776e-03 -2.4676e-02 -8.2135e-01
5 2.3719e-03 -2.4702e-02 -8.2391e-01
6 2.4998e-03 -2.4931e-02 -8.2662e-01
7 2.6770e-03 -2.5091e-02 -8.2986e-01
8 6.5918e-06 -1.7195e-06 -8.1387e-01
9 -6.8897e-06 4.1039e-06 -8.1884e-01
10 2.6237e-05 -7.3709e-06 -8.2394e-01
11 -5.2107e-05 4.3864e-05 -8.2931e-01
12 -2.3790e-03 2.4618e-02 -8.1386e-01
13 -2.3658e-03 2.4622e-02 -8.1635e-01
14 -2.3625e-03 2.4641e-02 -8.1882e-01
15 -2.4004e-03 2.4700e-02 -8.2138e-01
16 -2.4321e-03 2.4791e-02 -8.2394e-01
17 -2.4056e-03 2.4816e-02 -8.2657e-01
18 -2.3319e-03 2.4775e-02 -8.2887e-01
...
<此处省略一万字>
...
520 5.2912e-04 1.0342e-03 -4.1442e-04
521 0.0000e+00 0.0000e+00 0.0000e+00
522 0.0000e+00 0.0000e+00 0.0000e+00
523 0.0000e+00 0.0000e+00 0.0000e+00
524 0.0000e+00 0.0000e+00 0.0000e+00
525 0.0000e+00 0.0000e+00 0.0000e+00
526 0.0000e+00 0.0000e+00 0.0000e+00
527 0.0000e+00 0.0000e+00 0.0000e+00
528 0.0000e+00 0.0000e+00 0.0000e+00
529 0.0000e+00 0.0000e+00 0.0000e+00
530 0.0000e+00 0.0000e+00 0.0000e+00
531 0.0000e+00 0.0000e+00 0.0000e+00
532 0.0000e+00 0.0000e+00 0.0000e+00
533 0.0000e+00 0.0000e+00 0.0000e+00
534 0.0000e+00 0.0000e+00 0.0000e+00
535 0.0000e+00 0.0000e+00 0.0000e+00
536 0.0000e+00 0.0000e+00 0.0000e+00
537 0.0000e+00 0.0000e+00 0.0000e+00
538 0.0000e+00 0.0000e+00 0.0000e+00
The integration point (nip=1) stresses are:
Element x-coord sig_x tau_xy
y-coord sig_y tau_yz
z-coord sig_z tau_zx
1 4.1665e-01 -1.6922e+02 7.4603e+01
5.0000e-01 -2.1058e+01 1.2518e+02
-4.0000e-01 2.6853e+02 7.1402e+01
2 1.2500e+00 4.9339e+02 -2.5319e+02
5.0000e-01 2.5986e+02 1.6048e+02
-4.0000e-01 -6.0067e+02 -6.8331e+01
3 2.0834e+00 2.3960e+02 1.1597e+03
5.0000e-01 5.3165e+02 1.5338e+02
-4.0000e-01 4.4750e+03 3.5539e+02
4 4.1665e-01 3.4916e+01 -1.1448e+01
1.5000e+00 2.9443e+01 1.6057e+02
-4.0000e-01 5.2932e+00 2.6655e+01
5 1.2500e+00 -2.7901e+02 4.8352e+01
1.5000e+00 -2.4874e+02 2.0400e+02
-4.0000e-01 -1.7001e+02 3.6931e+01
6 2.0834e+00 5.2750e+02 -2.2657e+02
1.5000e+00 5.0020e+02 5.5917e+02
-4.0000e-01 -2.6498e+02 -3.2220e+01
...
<此处省略一万字>
...
55 4.1665e-01 -1.3728e-04 9.9451e-05
1.8500e+01 8.5541e-04 1.5749e+02
-4.0000e-01 -2.7138e-04 2.0642e+02
56 1.2500e+00 -1.0924e-04 4.8649e-05
1.8500e+01 6.3818e-04 1.1273e+03
-4.0000e-01 1.4572e-04 1.0028e+02
57 2.0834e+00 -7.5297e-04 3.3840e-06
1.8500e+01 3.2310e-04 6.3619e+02
-4.0000e-01 -3.5304e-04 -1.1781e+02
58 4.1665e-01 4.8693e-04 -2.0624e-04
1.9500e+01 1.0268e-03 -1.3259e+02
-4.0000e-01 6.3731e-04 2.1773e+03
59 1.2500e+00 5.2539e-04 5.7990e-05
1.9500e+01 1.2485e-03 2.5447e+03
-4.0000e-01 1.5490e-04 3.8806e+02
60 2.0834e+00 -5.0271e-04 8.1129e-05
1.9500e+01 9.0502e-04 8.1519e+02
-4.0000e-01 -1.1469e-03 -1.9705e+03
经过1117次PCG迭代(无预处理CG迭代增加到1436次),得到该悬臂结构的自由端位移(节点7的z向位移)为-8.2986e-1in,与直接算法的结果一致。从结果数据可以看出,在收敛容差1.0e-10的前提下,精度不超过1.0e-8的位移值,以及精度不超过1.0e-3荷载值,满足预期要求。迭代法的短板啊。但是,多快好省是强项,不容置疑。
采用本文算法自动生成EnSight Gold后处理文件,通过ParaView查看位移云图如下图所示。图中透明实体为初始(未变形)悬臂钢梁,蓝色向下箭头为自由端集中荷载。迭代算法和直接算法的位移云图几乎是重叠的。
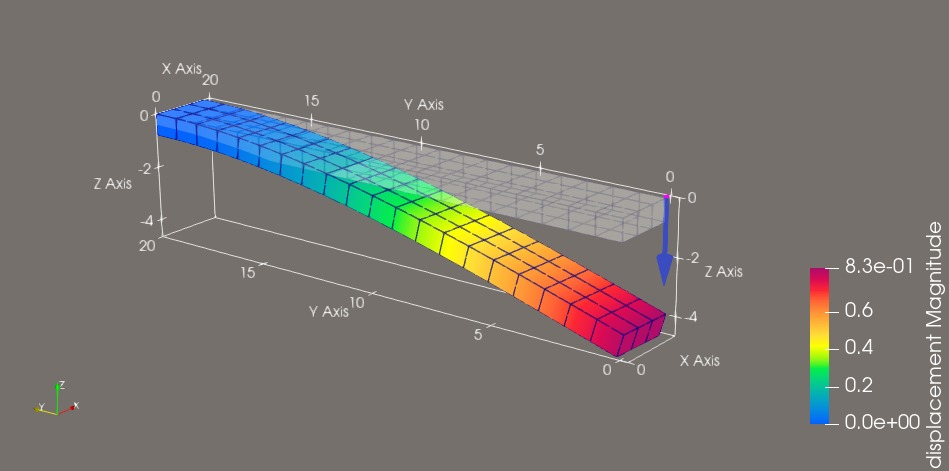
图4:位移云图-迭代算法-悬臂钢梁
6. 讨论
本文采用迭代法求解有限元方程,优势是计算效率高+内存消耗低;但是精确度不如直接法。基于PCG的逐个单元法(EBE),通过Jacobi预处理技术,改善系数矩阵的条件数,加速收敛速度;至于IC、SSOR等预处理方案,大家可以试试啊。
下面这个表格对比直接法和迭代法的核心区别。
| 直接法 | 迭代法 | |
|---|---|---|
| 核心原理 | ||
| 收敛性 | 无条件收敛(只要矩阵非奇异),结果具有确定性。 | 收敛性有条件,依赖于系数矩阵的性质(如谱半径<1),可能发散或收敛慢。 |
| 计算效率 | ||
| 内存消耗 | ||
| 数值稳定性 | ||
| 主要方法 | ||
| 典型应用场景 |
直接法是确定性高精度解的首选,迭代法是大规模问题的必然选择。在工程实践中,选择的本质是在精度、效率与可靠性之间寻找动态平衡——这恰是数值方法的魅力所在。稀疏矩阵+并行处理,计算效率进一步飞升,敬请期待。
参考文献:
[1]: Gene H. Golub, Charles F. Van Loan 著. 程晓亮 译. 矩阵计算(原书第4版)[M]. 北京: 人民邮电出版社, 2020 [2]: T. Sauer 著. 裴玉茹, 马赓宇 译. 数值分析(原书第2版)[M]. 北京:机械工业出版社, 2014 [3]: I. M. S mith, D. V. Griffiths, L. Margetts 著. 张新春, 慈铁军, 范伟丽 等译. 有限元方法编程(原书第五版)[M]. 北京: 电子工业出版社, 2017 [4]: T. R. Chandrupatla, A. D. Belegundu 著. 曾攀, 雷丽萍 译. 工程中的有限元法(原书第四版)[M]. 北京:机械工业出版社, 2021



