PID控制在ABAQUS中的程序实现

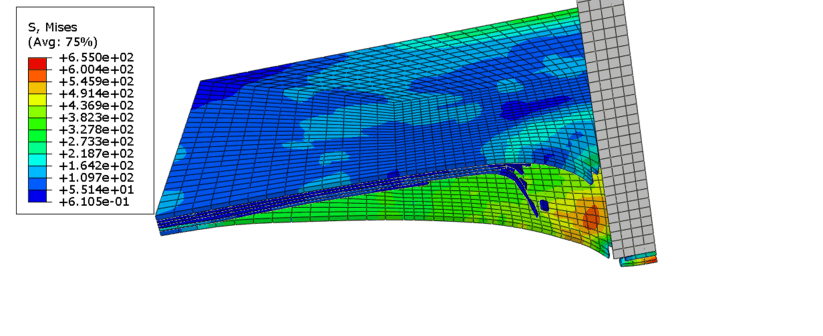
ABAQUS提供了全面的可以模拟系统级行为的能力,可以方便的定义传感器,并采集实际可测的物理信息。VUAMP子程序又可对此行为进行闭环控制。结合ABAQUS的有限元属性,因此其可以完成普通动力学软件不能胜任的工作,如考虑绳索材料属性的物理模型、流固耦合模型、复杂非线性问题的闭环控制实现。


PID作为工业界常用的控制手段,受其启发,可以采用FORTRAN语言结合ABAQUS数据计算更新模式,在VUAMP子程序中编写PID控制程序,实现在闭环控制下的动力学仿真验证工作。

下面的内容为付费内容,购买后解锁。
内容简介:PID程序实现案例(图片)
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2022-09-16
最近编辑:1年前

硕士
|
在读博士
哈工大在读工科博士



课程培训服务行家
课程
培训
服务
行家