PMSM模型预测MPC控制关键技术系列专题—基于广义双矢量MPFC的验证实现

导读:本期文章主要研究基于广义双矢量的MPFC,先分析与基于占空比(有效矢量+零矢量)的区别,然后对其实现的原理及过程进行阐述并进行对应的simulink仿真验证和分析。
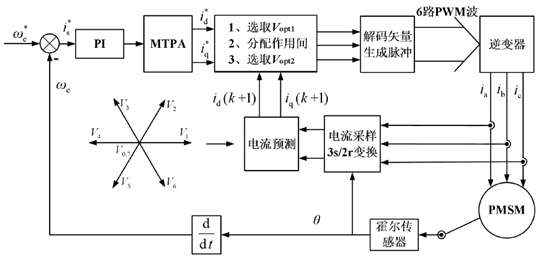
图1 双矢量模型预测系统框图
一、双矢量模型预测简析
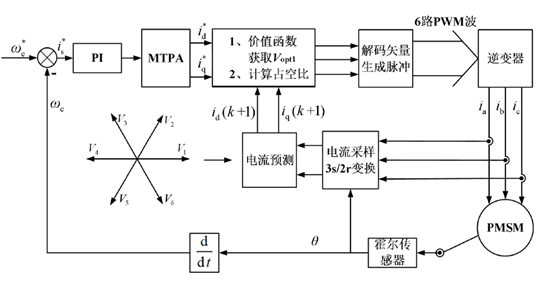
图2 占空比双矢量模型预测系统框图
双矢量模型预测转矩控制的控制框图如图(2)所示。其基本原理为:
1)与单矢量MPC原理选择出最优电压矢量Uopt一样。值得注意的是,在此方法中第二段矢量始终固定为零矢量,因此为确保一个控制周期内有两段电压矢量,Uopt只在有效电压矢量范围内进行筛选;
2)根据选择的Uopt计算其优化作用时间,根据占空比计算公式求得该矢量的作用时间tont;
3)根据所选择的电压矢量以及优化作用时间确定逆变器的开关脉冲。
由于零矢量的引入,与传统MPC相比,双矢量的模型预测转矩控制的电压矢量幅值能实现自我调节,因而控制更加精细,所以能实现比传统MPC更好的控制性能。
目前双矢量MPTC主要有两种形式:一种是基于占空比控制的模型预测转矩控制;另一种是任意双矢量模型预测转矩控制。基于占空比控制的模型预测转矩控制在一个控制周期内作用一个有效电压矢量和一个零电压矢量。任意双矢量模型预测转矩控制在一个控制周期内作用任意两个电压矢量。从本质上讲,基于占空比控制的模型预测转矩控制是一种特殊的任意双矢量模型预测转矩控制,只是其双矢量组合的方式受到了限制。这两种策略的控制性能在低速区间是基本一致的,在高速区间任意双矢量模型预测转矩控制具有更加优越的稳态性能。
二、广义双矢量实现的过程原理
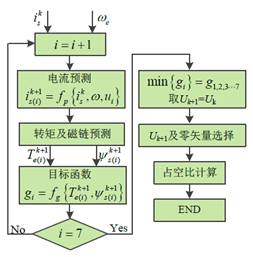
图3 基于有效矢量加零矢量的双矢量模型预测实现的流程图
不难看出前面的基于占空比的矢量组合始终固定为非零矢量加零矢量的组合,但是目前为止并没有明确的文献说明零矢量是最佳的第二个电压矢量,这说明前面方法所确定的矢量组合只是某个范围内的局部最优解。
广义双矢量的第二个矢量没有固定在零矢量,而是在更广的范围内进行选择。
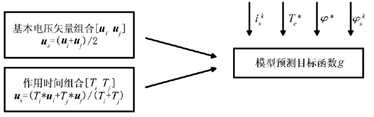
图4 广义双矢量的电压组合
三、对比验证分析
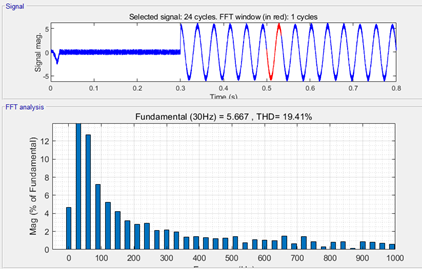
图5 单矢量MPFC控制策略电流FFT分析波形
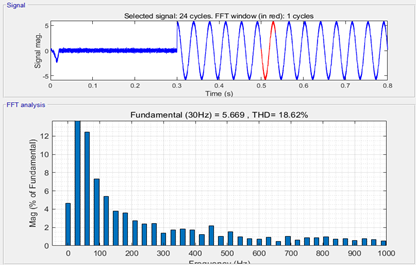
图6 双矢量MPFC控制策略电流FFT分析波形(基于占空比双矢量)
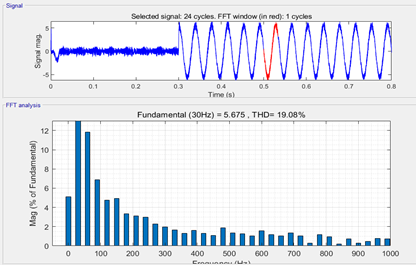
图7 双矢量MPFC控制策略电流FFT分析波形(广义双矢量)
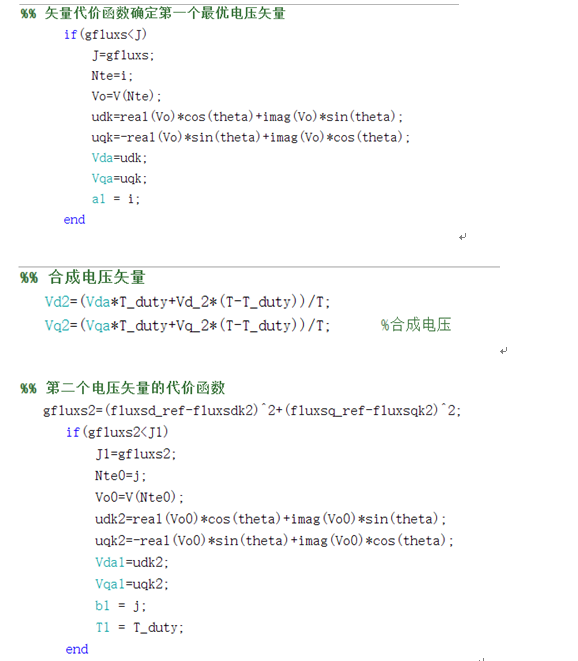
图8 广义双矢量的实现
从图(5~7)的电流FFT分析波形可以看出,双矢量因为在有效矢量的基础上又添加了一个电压矢量,对幅值进行调节从而使电流的谐波有所下降。谐波含量由高到低:单矢量>广义双矢量>基于占空比的双矢量。
对广义双矢量的电压组合进行简化或者处理,是否会降低电流的谐波含量?
四、问题总结与讨论
1、对于两电平驱动的调速系统来说,传统的广义双矢量存在的电压组合有7*7=49种,受限于数字处理器的运算能力,对这么多的矢量组合进行预测计算在实际应用中难以实施,因此有必要进一步研究不同矢量组合对系统性能的影响以消除冗余矢量以及明显对控制系统不利的电压矢量组合。
2、如何简化广义双矢量的电压组合?



