仿真测试入门参考之常用仿真软件(4):VTD

“目前仿真软件众多,不易挑选,这个系列尝试对场景的仿真软件进行介绍,给可能用到的朋友提供一些尽量全面、直观的参考。
根据之前的调研问卷结果,VTD是目前正在使用和感兴趣的人都很多的仿真软件,这篇对VTD进行简单介绍。建议想深入了解的朋友,联系厂家或者代理商申请软件试用。
VTD是海克斯康集团旗下软件,首先推荐海克斯康工业软件官方B站账号“海克斯康工业软件”,其发布的“VTD自动驾驶仿真”合集中的视频对VTD软件进行了全面的介绍。可点击文末的“阅读原文”进入。

软件的功能概述如下:
Virtual Test Drive (VTD)复杂交通环境视景建模、仿真软件由德国的VIRES公司开发,该公司成立于1996年,VIRES的产品主要是针对交通领域实时视景系统的应用而开发,包括汽车、轨道交通及航空领域,其中汽车ADAS系统测试的复杂交通视景系统开发是VIRES VTD最重要的应用方向,并已在奥迪、宝马及奔驰等整车厂中得到了广泛的应用。VIRES于2017年被Hexagon集团收购,增强了Hexagon在智能网联领域的产品布局。
针对车辆动力学仿真软件中存在的道路模型简单、交通和交通规则仿真能力不足、环境模型和驾驶员模型简单的不足,VTD提供了更加完善的仿真环境,特别适合L3以上复杂道路交通环境下的仿真测试需求。
VIRES与Daimler集团分别在2005年和2008年创立了完全开放的OpenDrive和OpenCRG标准,旨在将驾驶模拟器中所需对交通场景的控制及道路建模规范化。OpenDrive和OpenCRG标准的核心开发团队人员来自VIRES、Daimler、BMW、DLR、VTI、TNO等汽车制造商或研究机构,并以1年半的周期召开标准化的会议,对标准进行更新及改进。目前加入到OpenDrive和OpenCRG标准的成员包括有Daimler(VIRES视景系统最早在Daimler Driving Simultor 中应用)、BMW、Audi、DLR、Tesis及VTI – Swedish National Road and Transport Research Institute等汽车制造商、软件开发商及研究机构。OpenDrive/OpenScenario是欧洲整车厂(BMW,BENZ,Porsche,VW,Audi,Volvo, Opel, Valeo等)以及工具提供商推荐的ADAS及智能驾驶的标准组织,用于在地图,场景,工具以及测试功能间建立标准,VIRES也是该标准的发起者。

VTD软件具有强大的道路交通仿真能力,包括:
复杂路网建模,包含异形交叉路口、转弯、坡度、超高、及路边建筑如隧道、桥梁等
具有强大的交通仿真和交通规则仿真能力,包含交通流模拟、行人干扰,不遵守交通规则的车辆干扰并具备丰富的触发模式
多种天气模式和气象条件,雨、雪、雾、沙尘暴等
动态实时光影、HDR渲染和路面渲染
采用开放的标准和接口,非常适合与第三方软件进行联合仿真
出色的实时传感器仿真能力,包括理想传感器和复杂传感器,可以获得目标的Object List或者模拟传感器的原始数据
物理光源仿真能力
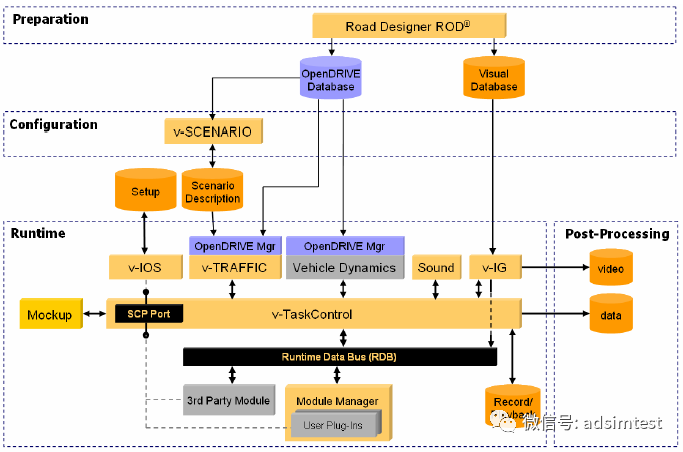
在VIRES- Virtual Test Drive软件中进行复杂交通场景的建模,可通过以下软件模块共同完成:
v – ROD
v-Traffic/ v-Scenario
v-IG
VTD支持导入的物体包括车辆本体、道路、车道线、道路上其他车辆、道路沿线景物、光线等。VTD强大的三维实时渲染引擎不仅可以根据之前定义的道路交通场景及车辆、行人行为生成实时的光影效果,还可以渲染雨、雪、雾天气及雨水路面、冰雪路面的反光。
V-TaskControl
V-IOS
仿真配置及操作的图形化的用户界面
SOUND 3D
车辆三维音效模拟模块,提供高质量的车辆运行中的音响环境,为驾驶模拟器提供逼真的浸入式的环境
Moudle Manager/3rd Party Moudle
支持用户自定义模块的导入,例如传感器模型、真实交通流数据、事故数据等,用户可以基于Framework创建自定义的功能模块,并与VTD实现联合仿真。
传感器
VIRES的雷达/传感器模拟可以用于校准、开发传感器模型以及从原始数据获取高分辨率图像的算法。VIRES使用实时的基于NVIDIA Optix的光线追踪法,并能够通过网络或共享内存接口输出最终的“图像”。场景中的每一个物体都可以被赋予相关的材料属性(反射特性、吸收特性),这些参数与真实传感器所接收到的数据信息非常相似。
VIRES的传感器模拟允许用户更改材料库参数及参数化传感器模型拓展应用场合;以及通过SDK,对传感器模型中渲染(rendering)/光线追踪(ray-tracing)过程中各环节进行自定义开发,同时允许建立自定义的材料模型,雷达束分布形态等。