
简介
目录
评价
服务:
- 课程资料下载
- 在线开票
- 提供培训通知
- 交流群
本课适合哪些人学习:
1、学习型仿真工程师;
2、理工科院校学生;
3、底盘悬架领域从业者;
4、底盘结构件方向得研究者或从业者。
你会得到什么:
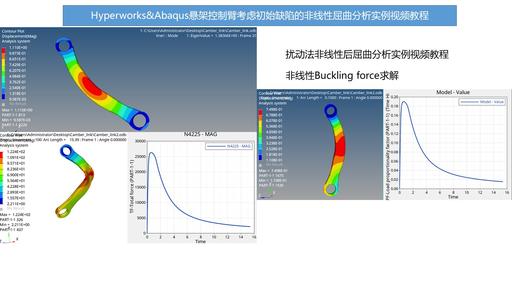
掌握如何使用hyperworks和abaqus两个软件,去仿真计算考虑了初始缺陷的后悬架控制臂的非线性buckling force值,主要包含三个内容:1、如何利用hyperworks进行控制臂本体的网格划分;2、如何在不打开abaqus软件的前提下,使用简单命令调用abaqus求解器,来求解线性屈曲载荷;3、如何引入产品的初始缺陷,来求解控制臂本身的非线性buckling force值。
课程介绍:
本课程详细介绍了如何使用hyperworks和abaqus两个软件,去仿真计算考虑了初始缺陷的后悬架控制臂的非线性buckling force值,主要包含三个内容:1、如何利用hyperworks进行控制臂本体的网格划分;2、如何在不打开abaqus软件的前提下,使用简单命令调用abaqus求解器,来求解线性屈曲载荷;3、如何引入产品的初始缺陷,来求解控制臂本身的非线性buckling force值。
课程相关图片:


本科
凡所有相,皆是虚妄
相关推荐
 ¥3680
¥3680 ¥3680
¥3680学生优享价 ¥3000 ¥3680
¥3680 ¥3680
¥3680 ¥2000
¥2000 ¥5980
¥5980¥6980 ¥2199
¥2199

