车载毫米波雷达的工作原理


大家好,我是团长。
最近检索了一些文章,又捡起高中物理,大致搞懂了毫米波雷达的工作原理。特写出来请大家点评。
目录:
1、什么是毫米波雷达
2、毫米波雷达的工作原理
2.1、距离
2.2、速度
2.3、方位
3、毫米波雷达的应用
4、毫米波雷达的四大家族
1、什么是毫米波雷达
毫米波是指波长在1-10mm,频率在30-300GHz的电磁波。对于想要实现自动驾驶的汽车来说,汽车毫米波雷达是核心传感器之一,尤以77GHz的毫米波雷达为最。它是能够在全天候场景下快速感知超大范围内周边环境物体距离、速度、方位角等信息的传感器。
扩展:毫米波雷达按照频段不同,主要有24G、60G、77G、79GHz四种,其中又以24GHz和77GHz的最为主流,其中24GHz的用于近距离探测(60m以内),77GHz的用于中远距离探测(最远可到200m以上)。
2、毫米波雷达的工作原理
车用毫米波雷达,通常采用适合近距离探测的FMCW(调频连续波)雷达体制,向外发出一系列连续调频毫米波(一般是连续的三角波),通过监测发射信号与接收信号之间的差异,进行距离、时间、方位的判断。


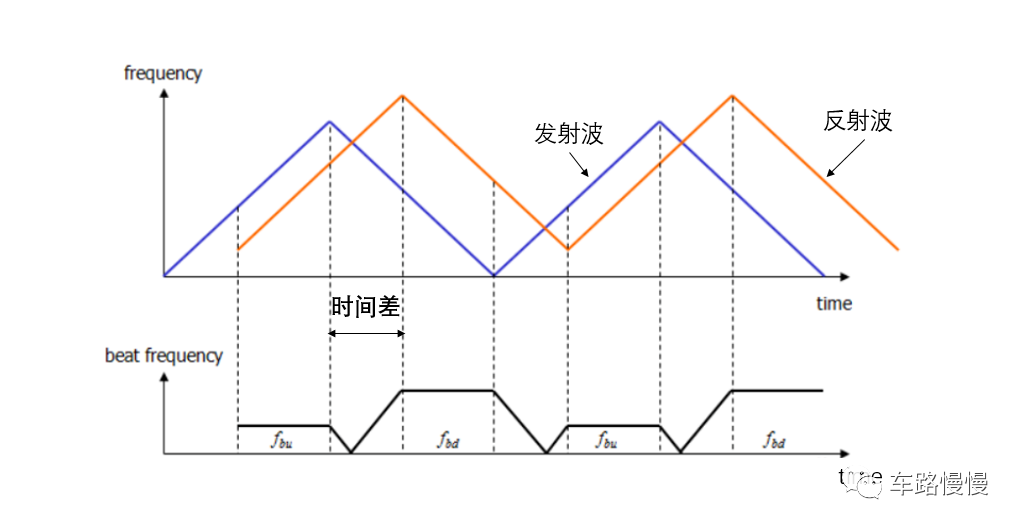
2.2、速度
2.3、方位角
4、毫米波雷达的四大家族
目前国际上主流的毫米波雷达供应商有四家,分别是奥托立夫(Autoliv)、博世(Bosch)、大陆(Continental)、德尔福(Delphi),简称ABCD。原理都大同小异,区别在于结构细节及相关绑定服务不一样。
本文完。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-06-21
最近编辑:10月前

硕士
自动驾驶仿真工程师一枚

课程培训服务行家
课程
培训
服务
行家
.jpg?imageView2/2/h/200)