第四部分 功率外环控制与Park变换矩阵之间的关系

“在4种Park变换矩阵下(点击可查看4种Park变换),如何用abc坐标和dq坐标系分别表示瞬时有功、无功功率?在dq轴坐标下为什么外环功率控制器有2种形式?”
4种派克(Park)变换、克拉克(Clark)变换与基于dq轴解耦的双闭环控制之间的关系(四)
第四部分 功率外环控制与Park变换矩阵之间的关系
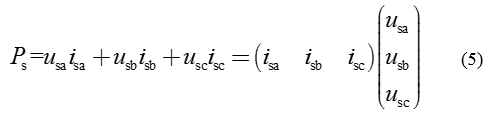
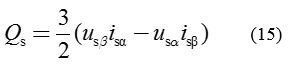
abc三相静止坐标系下系统侧有功功率Ps和无功功率Qs的求解公式是唯一的。根据瞬时功率理论,交流系统有功功率Ps和无功功率Qs分别为:

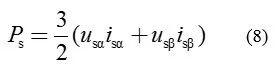
但在dq同步旋转坐标系下,有功功率Ps和无功功率Qs表现出了以下2种形式:

接下来介绍在dq同步旋转坐标系下,有功和无功功率表现两种形式的原因。
01 第一种Park变换矩阵下的有功功率和无功功率
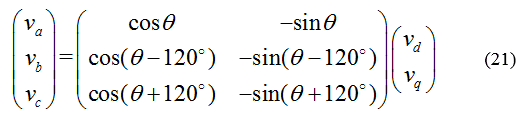
第一种Park变换矩阵如下:

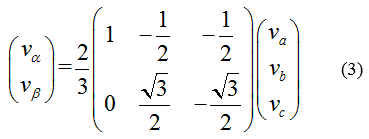
其选用的Clark变换及其反变换矩阵如下:
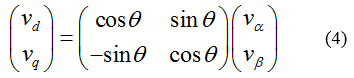
推导方式一:


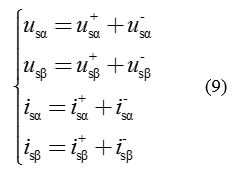


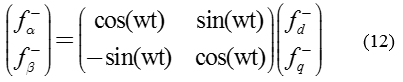


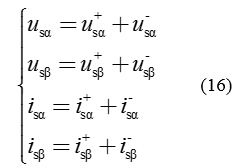
 由反park变换得:
由反park变换得:
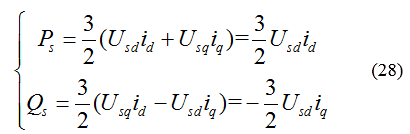
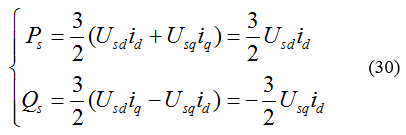
当系统正常运行时,只有正序分量,负序分量为0,且以d轴定向,则 
推导方式二:





在第二种Park变换矩阵下,dq轴坐标下的有功和无功功率的求解过程与第一种基本相同,但是由于Park变换矩阵的不同导致有功和无功功率的计算式有正负号的差别,此处不再计算直接给出结果,其值可表示为:

03 第三种Park变换矩阵下的有功功率和无功功率

在第三种Park变换矩阵下,dq轴坐标下的有功和无功功率的求解过程也与第一种基本相同,此处不再计算,其值可表示为:
04 第四种Park变换矩阵下的有功功率和无功功率

在第四种Park变换矩阵下,dq轴坐标下的有功和无功功率的求解过程也与第一种基本相同,此处不再计算,其值可表示为:
05 总结
虽然abc坐标系下瞬时有功功率和无功功率的形式唯一,但由于Park变换矩阵的多种多样,导致在dq坐标下瞬时有功功率和无功功率表现出两组不同的形式,在构建仿真模型时,要根据选用的Park变换矩阵去选择合适的功率计算公式。
至此,这期四个部分,以“4种派克(Park)变换、克拉克(Clark)变换与基于dq轴解耦的双闭环控制之间的关系”为主题的系列探讨就结束了。主要内容均是围绕4种Park变换展开,最原始的依据则是第一部分中4张abc坐标系与dq坐标系的关系图,只要弄懂这4张关系图,则其余部分中的结论均可推导得到。