潜艇如何“消音”?LES与DES仿真技术揭秘水下攻防的噪声博弈



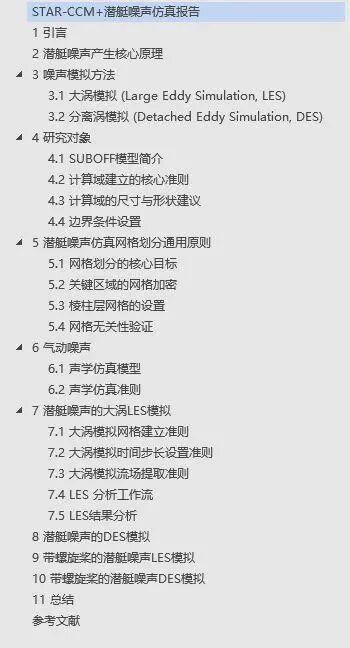
潜艇噪声产生核心原理

噪声模拟方法
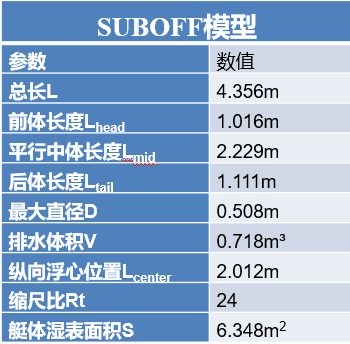
潜艇噪声仿真模型和准则
潜艇噪声仿真方法
潜艇噪声 LES 分析工作流
噪音LES和DES计算视频教程
提供vip群答疑和模型下载
《STAR-CCM潜艇及螺旋桨噪音LES和DES计算及验证》

课程内容及大纲
第1讲:潜艇阻力预测-潜艇流体域几何建立准则
第2讲:潜艇阻力预测-在建模软件中进行边界命名
第3讲:潜艇阻力预测-潜艇几何模型处理
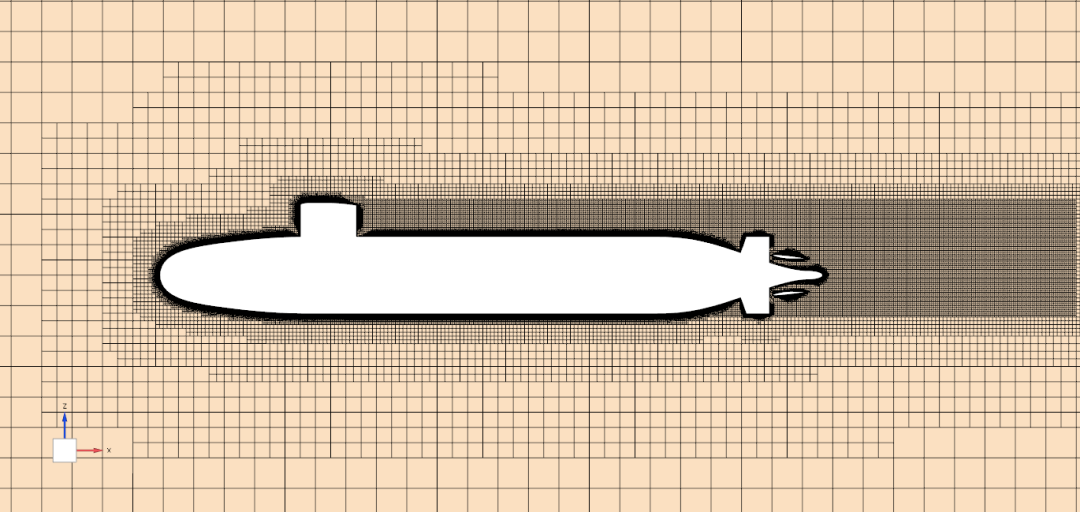
第4讲:潜艇阻力预测-建立潜艇网格
第5讲:潜艇阻力预测-建立物理模型
第6讲:潜艇阻力预测-设置边界条件
第7讲:潜艇阻力预测-设置阻力系数报告
第8讲:潜艇阻力预测-建立场景
第9讲:潜艇阻力预测-设置求解参数
第10讲:潜艇阻力预测-结果与文献对比
第11讲:潜艇噪声大涡模拟-网格和时间步准则介绍
第12讲:潜艇噪声大涡模拟-建立大涡模拟网格
第13讲:潜艇噪声大涡模拟-建立大涡模拟物理模型
第14讲:潜艇噪声大涡模拟-设置边界条件
第15讲:潜艇噪声大涡模拟-监测压力波动
第16讲:潜艇噪声大涡模拟-建立压力波动场景
第17讲:潜艇噪声大涡模拟-设置求解器
第18讲:潜艇噪声大涡模拟-CPU与GPU计算速度对比
第19讲:潜艇噪声大涡模拟-计算求解
第20讲:潜艇噪声大涡模拟-总声压级与文献对比
第21讲:潜艇噪声大涡模拟-制作声压波动动画
第22讲:潜艇噪声分离涡模拟-建立分离涡模型
第23讲:潜艇噪声分离涡模拟-分离涡和大涡结果对比分析
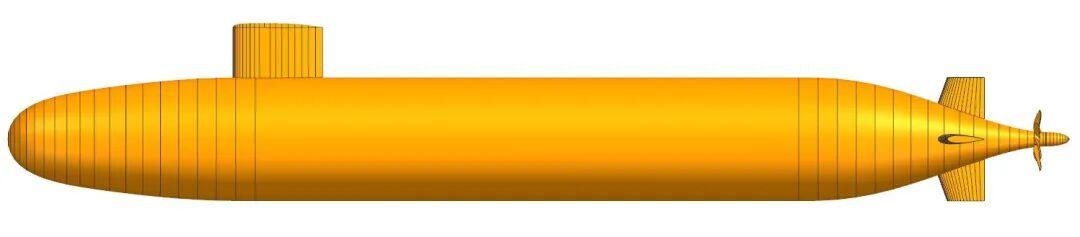
第24讲:带螺旋桨的潜艇噪声大涡模拟-建立潜艇和螺旋桨几何模型
第25讲:带螺旋桨的潜艇噪声大涡模拟-替换潜艇几何和增加螺旋桨几何
第26讲:带螺旋桨的潜艇噪声大涡模拟-建立网格
第27讲:带螺旋桨的潜艇噪声大涡模拟-设置边界条件
第28讲:带螺旋桨的潜艇噪声大涡模拟-建立推理系数和扭矩系数等报告
第29讲:带螺旋桨的潜艇噪声大涡模拟-建立场景
第30讲:带螺旋桨的潜艇噪声大涡模拟-推力系数与扭矩系数验证
第31讲:带螺旋桨的潜艇噪声大涡模拟-噪音结果分析
仿真报告
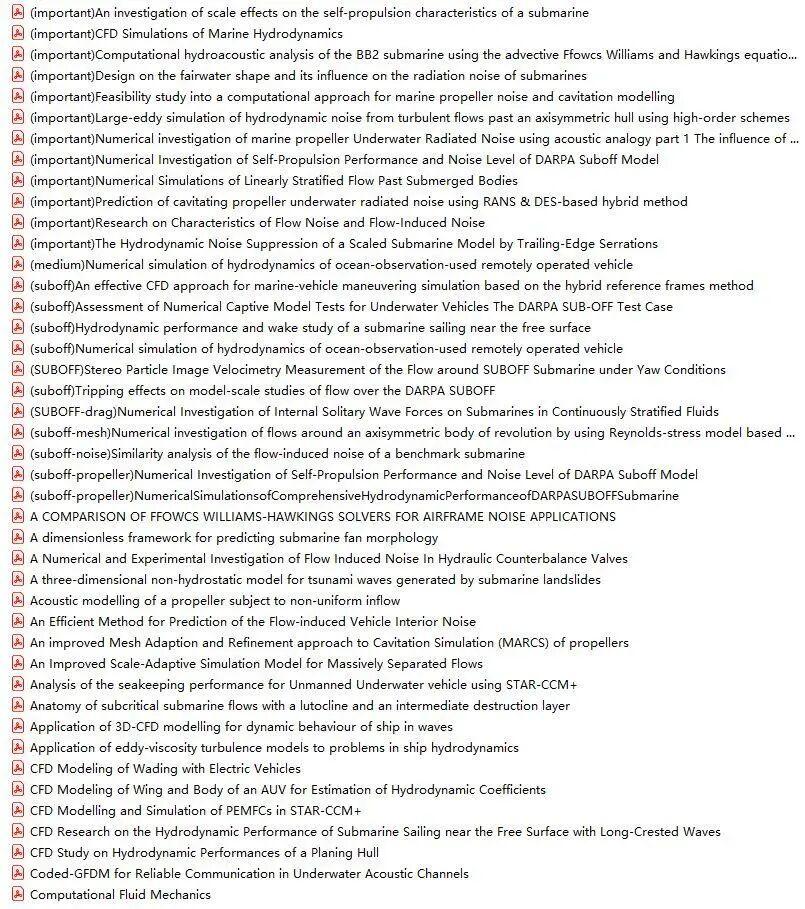
英文参考文献-与文献进行对标
中文参考文献

几何模型
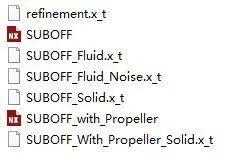
计算文件

噪音与文献对比
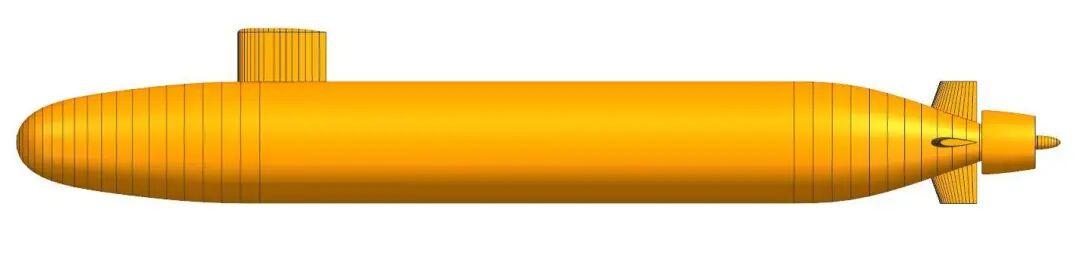
以SUboff潜艇和INSEAN E1619 螺旋桨为研究对象,采用大涡模拟和分离涡模拟对潜艇噪音进行了计算,计算总声压为107.9dB,与文献[12]中103.4 dB的偏差为(107.9-103.4)/103.4=4.35%。