
机器人
- 深蓝学院2年前发布了课程
 基于GNN为群体机器人构建信息分享机制
基于GNN为群体机器人构建信息分享机制本报告将围绕图神经网络是什么,并以主讲人的科研的代表作为主线,即如何通过图神经网络构建去中心化群体机器人系统内部的信息分享机制。
免费 播放量27 - 深蓝学院2年前发布了课程
 CogDL:助力图机器学习的研究与应用
CogDL:助力图机器学习的研究与应用本次报告主要围绕着图机器学习相关研究和CogDL工具包。CogDL是由清华大学KEG实验室联合多家单位共同研发的工具包,旨在助力国内外图机器学习的...
免费 播放量17 - 仿真圈2年前发布了文章
 工业机器人视觉直播,4天速成视觉方案制定和代码编写及验收
工业机器人视觉直播,4天速成视觉方案制定和代码编写及验收作者|指南车机器人科技仿真秀平台认证机构首发|仿真秀App导读:机器视觉应用领域广阔,发展空间巨大。横向上,机器视觉的应用将渗透至更多行业...
浏览量 2726 - 深蓝学院2年前发布了文章
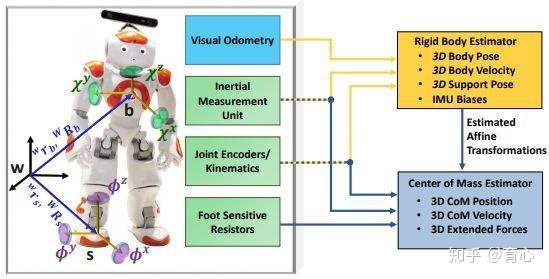 如何准确估计机器人的状态,增强机器人控制的精度及稳定性
如何准确估计机器人的状态,增强机器人控制的精度及稳定性在机器人学中,状态估计和控制一样,是无法避开的问题。任何传感器的精度都是有限的,如何利用传感器信息,尽可能准确地估计一组完整描述机器...
浏览量 1606 - 深蓝学院2年前发布了文章
 公开课精华|机器人的带约束轨迹规划
公开课精华|机器人的带约束轨迹规划本文章总结于大疆前技术总监,目前在卡内基梅隆大学读博的杨硕博士在深蓝学院的关于机器人的带约束轨迹规划的公开课演讲内容。--------全文约...
浏览量 2423 - 深蓝学院2年前发布了文章
 公开课精华 | 移动机器人视觉三维感知的现在与将来
公开课精华 | 移动机器人视觉三维感知的现在与将来本文总结于香港科技大学王凯旋博士关于移动机器人视觉三维感知的现在与将来的公开课,其中主要介绍了基于视觉的三维环境感知方案,包括传统方...
浏览量 2450 - 深蓝学院2年前发布了文章
 全网超全 | 机器人顶会IROS 2021 论文集!
全网超全 | 机器人顶会IROS 2021 论文集!自上次整理了ICRA2021论文集后,好多朋友问:有没有IROS2021的论文集?我心里一咯噔,糟了,不会是跟ICRA一样难找吧!结果去网上扒一扒,查一...
浏览量 2359 - 指南车工业机器人2年前发布了课程
.jpg?imageView2/0/w/550/h/308) ABB IO卡板的基本认识
ABB IO卡板的基本认识ABB IO卡板的基本认识
免费 播放量88 - CAE备忘录2年前发布了课程
 ANSA中创建3D点
ANSA中创建3D点介绍ANSA的基本操作,认识3D点的创建
免费 播放量337 - 指南车工业机器人2年前发布了文章
.jpg?imageView2/0/w/550/h/308) 掌握机器人自动化技能 迎接高薪未来
掌握机器人自动化技能 迎接高薪未来随着智能制造的不断推进,工业机器人作为发其展基石备受关注。《中国制造2025》规划中提出,要把智能制造作为信息化与工业化深度融合的主攻方...
浏览量 3036


.jpg?imageView2/0/w/96/h/96)

