结构有限元网格节点耦合的几个高效方法

1. 前言
在创建结构有限元模型的过程中,相邻节点处于耦合(共享)状态是非常重要的,是保证结构有限元分析结果正确性的前提。实际上,当几何结构的拓扑(Topo)关系正确时,相邻几何上的网格会自动耦合节点,无需过度关注。但是当几何结构关系发生错误时,在划分网格的过程中,常常要手动来耦合节点(非常不建议在几何结构拓扑关系有错误时划分网格,费时费力,网格质量也不尽人意)。
2. 常用节点耦合方法
首先简单概述一下常用的节点耦合方法。
比如,如图1这个结构,当拓扑关系正确时,选择两个面同时划分网格,节点自动就耦合在一起了,无需任何操作,并且网格匀称,见图2。
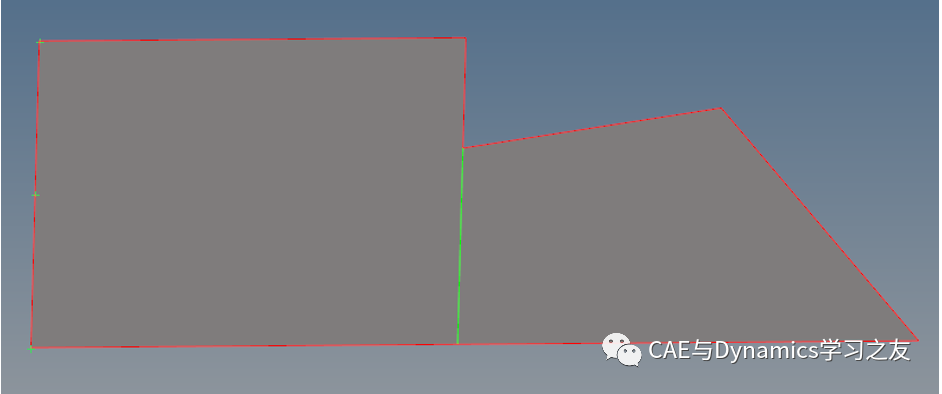
图1 拓扑关系正确的两个平面
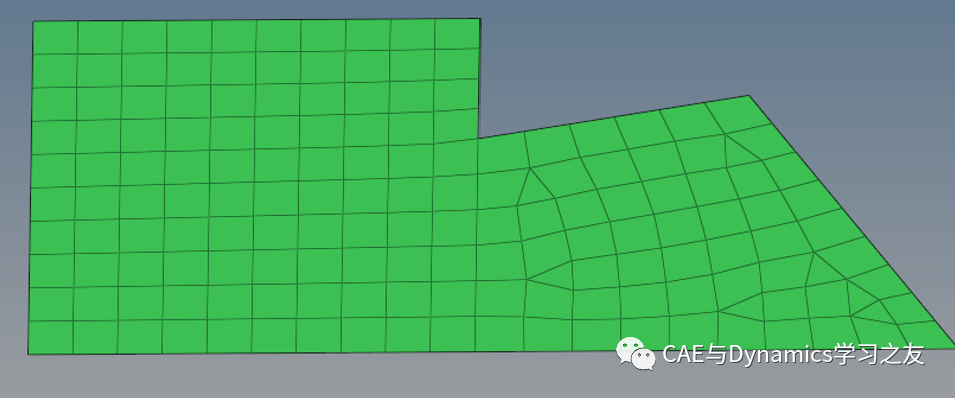
图2 拓扑关系正确时节点耦合
当两平面拓扑关系错误时(见图3),选择两个面同时划分网格,节点没有耦合在一起(见图4),需手动操作调整。

图3 拓扑关系错误的两个平面
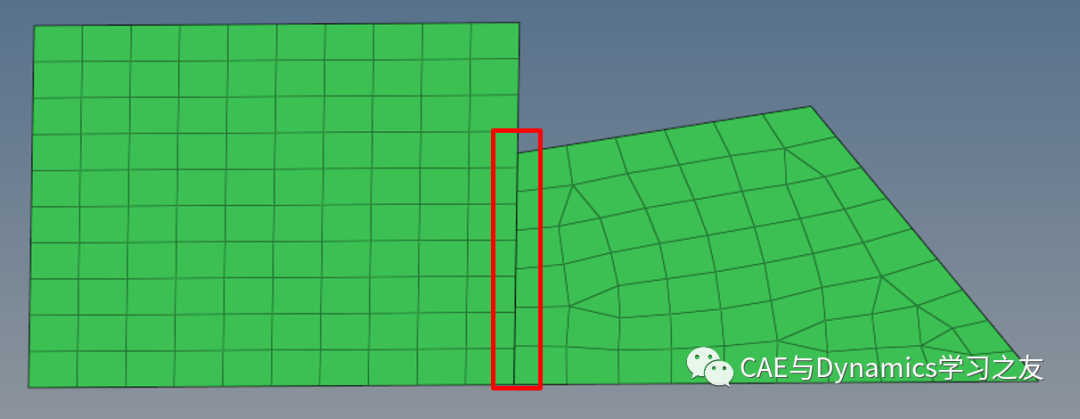
图4 拓扑关系错误时节点不耦合
当相邻节点没有耦合在一起时,一般先在Tool>edges面板上,选择一个合适的容差值(不能太大,否则会使节点连接错误,一般不超过网格尺寸的20%)进行equivalence,使距离小于容差的节点批量耦合在一起,见图5。距离小于2mm的节点会批量耦合在一起,距离大于2mm的节点仍然处于未耦合状态。
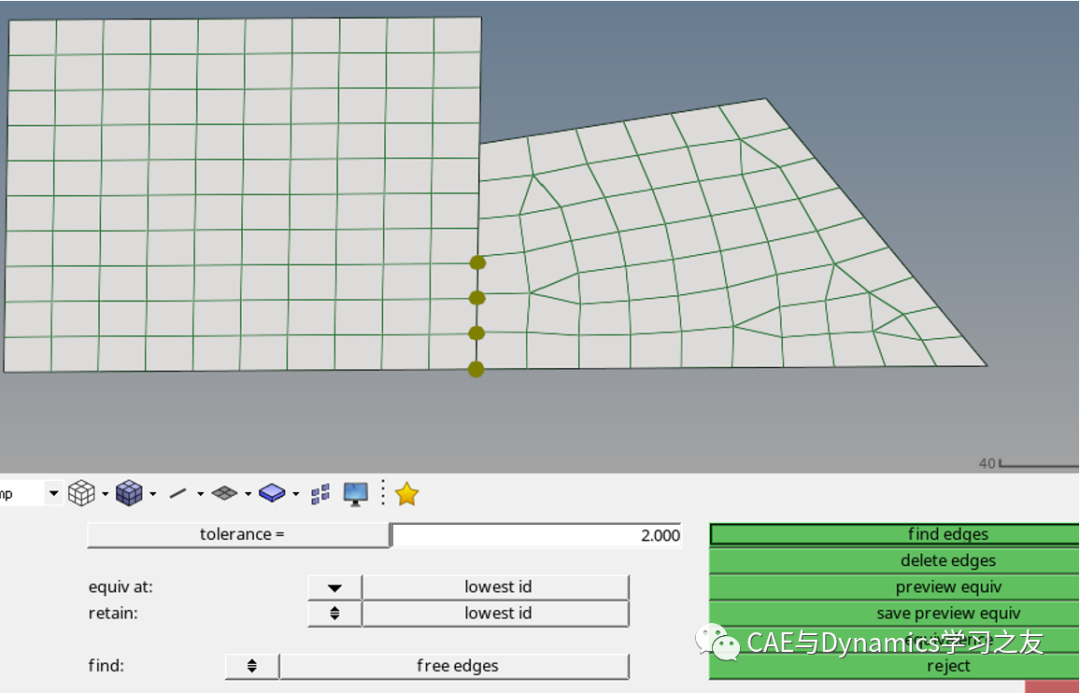
图5 批量耦合节点
对于还未耦合的节点,在2D>replace界面中手动耦合节点,见图6。与图2相比较,图6中的网格平顺性较差。
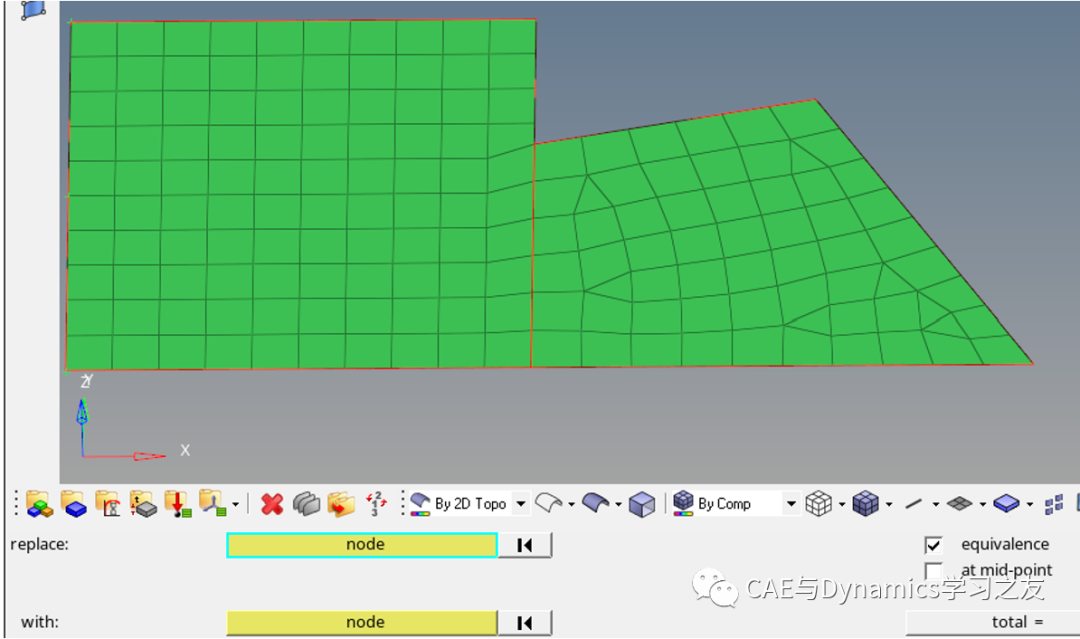
图6 手动耦合节点
以上介绍的是最最常用的节点耦合方法。在实际工程应用中,遇到的问题肯定更加棘手。
3. 高效耦合节点方法
为了突出重点,讲解清晰,创建了3个简单场景,同时提炼出了3个问题:
(1) 在已经划分好的平面网格上,需要增加一个空心圆筒,圆筒底部网格需与平面网格节点耦合,如何快速操作?(问题1:在网格上生出网格)
(2) 已划分好网格的一个平面与圆筒相交,但是相交处节点没有耦合在一起,想让相交处节点耦合在一起,如何快速操作?(问题2:相交处网格节点的耦合)
(3) 已划分好网格的一个平面与圆筒,两者没有相交,想让圆筒沿着轴向方向与平面相交,且相交处网格节点要耦合在一起,如何快速操作?(问题3:延伸网格与周边网格相交)
3.1 在网格上生出网格
如何在图7中的平面网格上生出圆筒网格,并保持节点耦合?
图7 问题1场景
(1) 进入Geom<lines面板,选择圆心,输入半径,画出一个圆。然后进入Automesh面板,选择平面网格,再选择刚画的圆,mesh一下。结果如图8所示。

图8 圆的生成及网格划分
网格划分完,可以发现线上的节点与周边网格节点耦合了。
(2) 进入2D>drag面板,选中圆线上的节点,拉伸。(圆一次性拉不成功,需要两次拉伸)
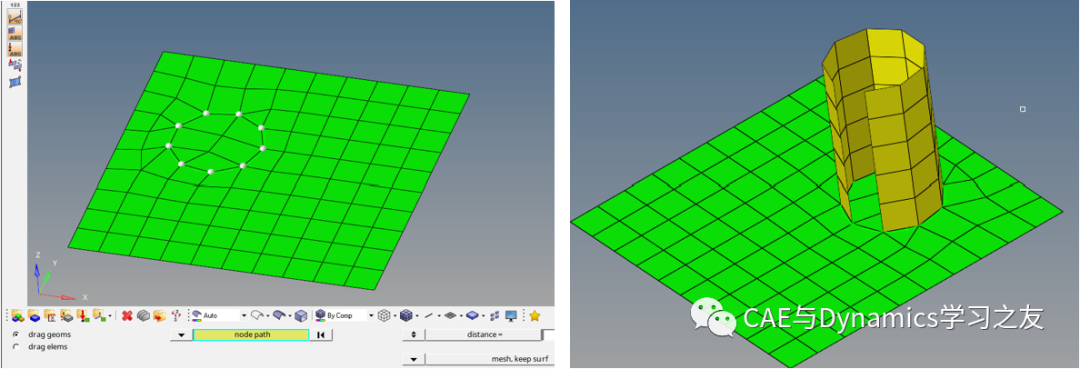
图9 圆筒的第一次拉伸
再拉伸缺口,见图10。
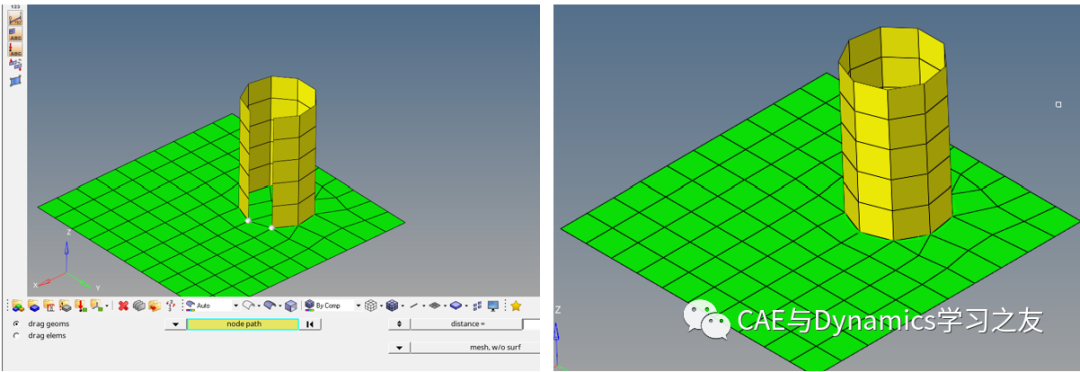
图10 圆筒的第二次拉伸
(3) 最后进入edges界面进行节点耦合。
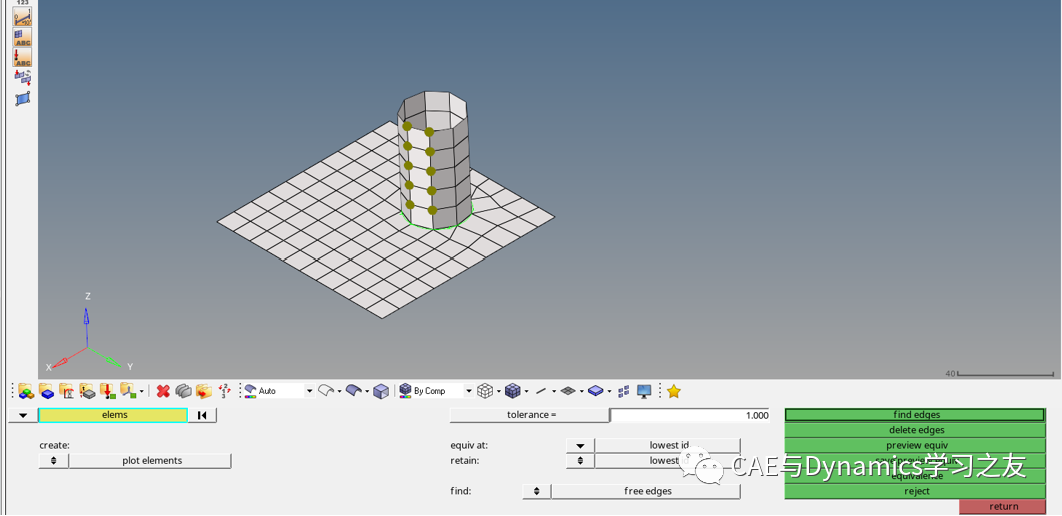
图11 耦合节点
3.2 相交处网格节点的耦合
图12的平面网格与圆筒网格相交,但是相交处节点没有耦合,如何快速耦合相交处的节点。
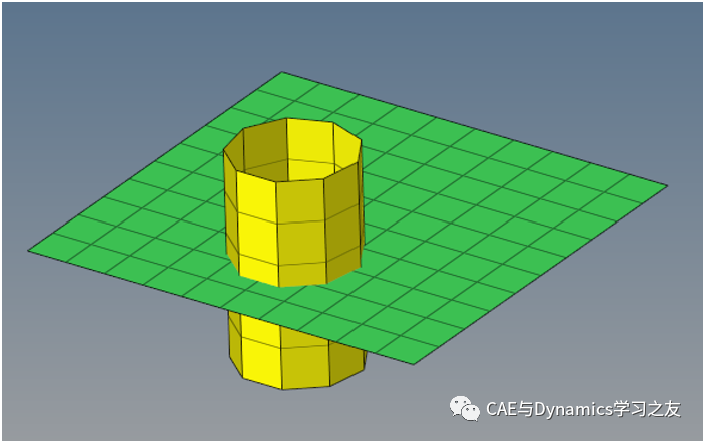
图12 问题2场景
进入菜单栏Mesh> boolean operation,选择两网格所在的component,同时勾选“Keep intersect edges”和“Local remesh atcontacts”,填入参数,见图13。设置完成后,Run一下。
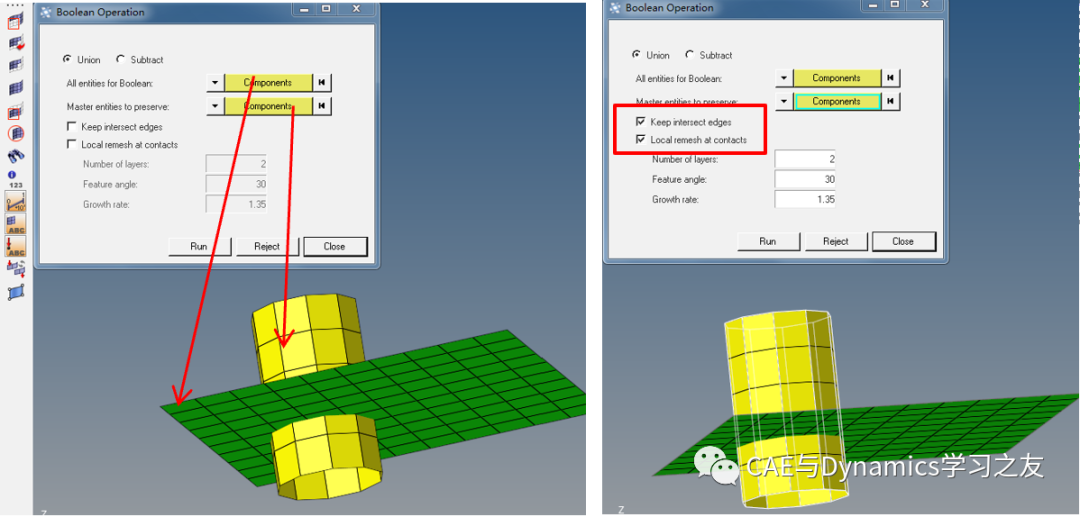
图13 布尔运算设置
运行完发现相交处节点已经耦合了,见图14。
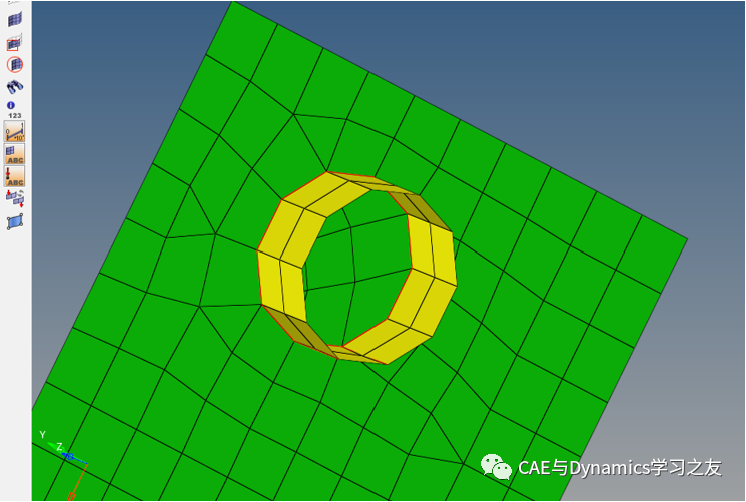
图14 布尔运算后节点耦合
3.4 延伸网格与周边网格相交
已经划分网格的一个平面与圆筒分离,见图15,想让圆筒沿着轴向方向与平面相交,且相交处网格节点要耦合在一起,如何快速操作?

图15 问题3场景
进入2D>mesh edit,选择extend。“Source”选择即将延长的节点,“destination”选择平面网格所在的组件,使用轴向方向上的三个节点确定延伸方向,见图16。设置完成后,create一下。

图16 延伸网格设置
操作完之后,发现圆筒网格已经延伸至平面网格了,且相交处网格是耦合在一起的,见图17。
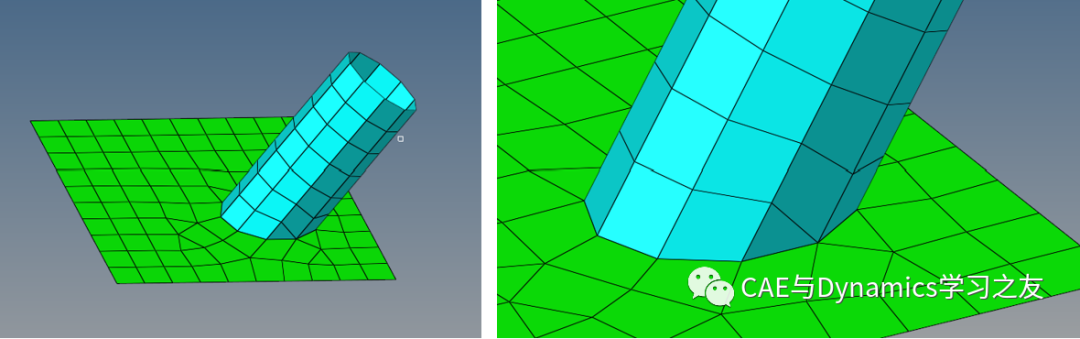
图17 延伸网格后节点耦合
4. 结束语
对于一些装配体,虽然可以采用绑定接触算法、多点约束(MPC)、1D单元等来处理力的传递,但是毫无疑问,节点耦合还是运用最广、计算最快、收敛性最好的方法,只是在前处理阶段要花费较长的时间来处理,因此掌握一些高效节点耦合的方法十分有必要。