新能源车企押注机器人!走近机器人数字样机建模仿真技术

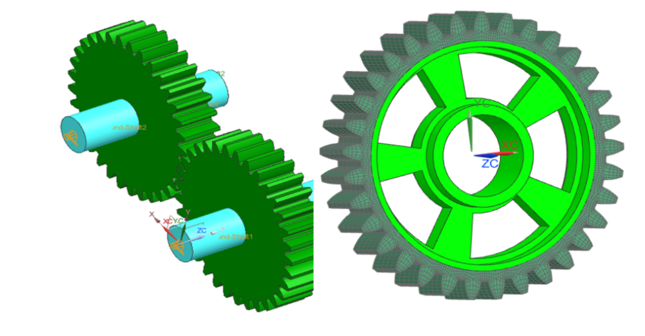
导读:近年来,新能源车企扎堆布局机器人赛道。其中小鹏鹏行完成A轮融资,金额超1亿美元。根据公开资料显示,这也是近两年中国最大单笔仿生机器人融资。此轮融资领投方之一为IDG资本,小鹏汽车等股东跟投。无独有偶,新能源汽车巨头特斯拉在2021年也高调宣布进军机器人领域,同年现代汽车集团宣布完成对波士顿动力的收购,拥有波士顿动力 80% 的股份。此外,2022年吉利汽车、上汽集团和小米汽车均加大对汽车机器人研发投入。据媒体报道【1】,新能源车企扎堆布局机器人赛道的背后,实则是对未来发展的一种潜在对冲,燃油车的退市几乎已成定局。根据乘联会数据显示,2022年上半年,新能源乘用车销量224.8万辆,同比增长122.5%,其中6月新能源汽车渗透率达到了27.4%,智能化也正在高歌猛进。正是凭借着超级工厂的超高智能化程度,特斯拉的毛利轻松超越传统车企巨头丰田的毛利。而这一切的背后,恰恰是得益于产线机器人的不断进化,从而做到降本增效的革命性改进中信证券研报也指出,长期来看,全球新能源汽车步入高速成长阶段,当前时点继续把握全球自动化供应链优质标的机会,尤其是特斯拉、宁德时代、LG化学的供应链。考虑供需持续释放,行业持续高景气,中信证券研报也在中汽协的基础上,上调了2022年我国新能源汽车销量预测至600万辆(原预测为550万辆)。总之,新能源汽车的高速发展,会直接带动智能化、自动化的刚性需求。从搬运、焊接、装配、加工、喷涂等多个生产环节,工业机器人也逐步扮演起了不可或缺的重要角色。无论是制造环境下应用的工业机器人,还是非制造环境下应用的服务机器人,其整机性能、零部件可靠性以及机械-控制系统的协同性都是决定机器人质量、品质以及竞争力的关键指标。机器人作为一类典型的现代复杂产品,其设计过程中面临着诸多的挑战,需要更多、更复杂的决策。显然,设计阶段早期通过CAE分析预测得到的可靠信息对于设计人员的决策具有极其重要的作用,尤其在研机器人的物理样机尚未产生之前,通过机器人数字样机可以将诸多设计思想快速地付诸于可视化验证,为设计决策提供分析依据。RecurDyn多体动力学仿真分析作为一种CAE手段,可对机械产品全面地进行系统级的仿真,其先进的MFBD技术在仿真机械人零部件刚度对于机器人精度影响方面具有重要的作用,其机械-控制一体化仿真技术对于验证机器人执行机构与控制系统的协同性高效、便捷。下面分享一些RecurDyn产品线产品在机器人性能仿真中的应用。"可根据作业运动功能的要求,确定机器人末端执行器应达到的位置轨迹线和姿态;
"通过给出各关节运动量,求出机器人的实际工作空间及姿态;
"可分析构件的速度和加速度,分析末端执行器上所夹持的工件角速度分析;
设计要求机械手臂的结构和尺寸应满足机器人完成作业任务提出的工作空间要求,在设计要求约束下的手臂运动响应速度能否达到精确性和刚度的要求,可通过RecurDyn产品线中RecurDyn/F-FLEX模块,建立刚柔混合机器人数字样机模型进行验证。比如:验证手腕回转各关节轴上要设置限位开关和机械挡块能否防止关节超限造成事故?验证末端执行器是否能完成夹持任务?验证末端执行器对夹持物的加持力是否会造成受损?验证并联机器人机座结构在机器人工作时的稳定性、强度、刚度、承载能力以及机座轴系及传动链的精度和刚度对末端执行器的运动精度影响。机器人执行机构从控制系统得到动作指令,执行机构将动作信息反馈给控制系统,这个交互过程的信息是动态时变的,单纯的假定机械反馈来设计控制系统,或者假定控制信息来设计执行机构,实际上将耦合发生的事件人为分割为两个部分不易验证机器人执行机构与控制系统协同,通过机电控数字样机可以仿真验证机械与控制之间的匹配性,比如执行特种任务的履带式机器人在控制指令下的爬坡机动性分析。
参考:M. Pellicciari, G.Berselli, F.Leali, A.Vergnano. A method for reducing the energy consumption of pick-and-place industrial robots. Mechatronics 23 (2013) 326–334参考:Xinghua Tian, Feng Gao, Chenkun Qi, Xianbao Chen, Dan Zhang. External disturbance identification of a quadruped robot with parallel–serial leg structure. Springer Science+ Business Media Dordrecht 2014, Int J Mech Mater Des DOI 10.1007/s10999-014-9288-4参考:Sang-Mun Lee, Kyoung-Don Lee, Heung-Ki Min, Tae-Sung Noh, Jeong-Woo Lee. Kinematics of the Robomec Robot Hand with Planar and Spherical Four Bar Linkages for Power Grasping. 8th IEEE International Conference on Automation Science and Engineering August 20-24, 2012, Seoul, Korea.4)验证基于CPG控制结构的频率自适应蛇形机器人以恒定速度在不同摩擦系数的地形移动性能参考:Jae-Kwan Ryu,Nak Young Chong, Bum Jae You,Henrik I. Christensen. Locomotion of snake-like robots using adaptive neural oscillators. Springer-Verlag 2009. Intel Serv Robotics (2010) 3:1–10 DOI 10.1007/s11370-009-0049-45)皮带驱动柔性多体动力学大型太阳能电池板搬运机器人设计开发 参考:Eun Yim Cho, Jinsu Kim, Sungsoo Rhim. Modeling of Large Scale Solar Cell Handling Robot with Belt-Driven Flexible Arms, The 6th Asian Conference on Multibody Dynamics, August 26-30, 2012, Shanghai, China仿真秀以分享知识传递价值,为仿真优质内容创作者赋能,解决机器人行业关联企业研发技术攻关中的难点,并服务国家重大需求。自2023年2月2日起,仿真秀正式启动机器人-工业品仿真技术专题讲座。对于已经身处机器人行业、或是有意从事机器人相关专业的同学和工程师们,可以关注仿真秀接下来的几场直播讲座。他们是RoboMaster大赛冠军战队参赛选手、多体动力学仿真工具RecurDyn公司资深专家、还有水下机器人方向的博士和研究者等等。2月24日,仿真秀机器人工业品仿真第三期讲座《基于RecurDyn机器人数字样机建模仿真技术》将邀请RecurDyn中国产品经理焦晓娟博士,她将通过案例分享方式概述了RecurDyn仿真在机器人研发过程的能够扮演的作用,从多体动力学的角度剖析RecurDyn机器人数字样机模型的组成,重点讨论了基于RecurDyn建立机器人数字样机仿真模型的几项关键技术,最后给出基于RecurDyn进行机器人数字样机仿真所需要的模块配置。以下是讲座安排
工业品机器人仿真(三):基于RecurDyn的机器人数字样机建模仿真技术-仿真秀直播
对于已经身处机器人行业、或是有意从事机器人相关专业的同学和工程师们,我们不仅为大家精心准备干货直播 ,此外还有准备了机器人仿真设计学习资料包,感兴趣朋友还可以加入机器人工业品仿真设计或RecuDyn技术交流群。获赞 9041粉丝 20399文章 3164课程 204