【定量分析】制导航弹半实物仿真系统误差分析与建模

-1-
引言
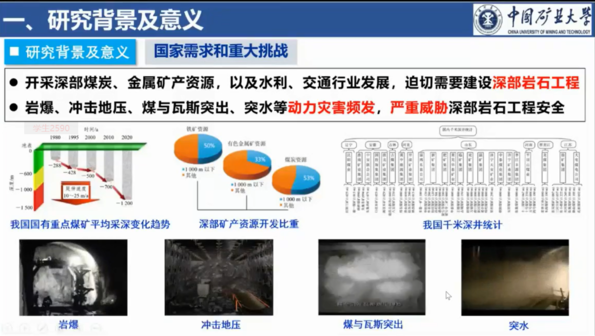
制导航空炸弹半实物仿真系统 ,作为一个用于特定研究目的的试验和测试系统 ,存在着各 种各样的 误差因素 。深入研究和分析系统中内在和外在的误差因素及其联系 ,找出影响仿真结果的主要误差源 ,建立各仿真设备的误差模型 ,并采取相应措施尽可能消除各类误差源 ,是进行制导系统半实物仿真研究过程中的至关重要的一环 ,对提高仿真系统的精度具有十分重要的意义 。
在仿真试验过程中 ,影响仿真精度的误差因素是多方面的 ,譬如系统设计方法 、系统的实现方法 、系统工作环境 、测量设备 、计量方法 、试验人员素质等等 。
系统设计方法误差主要指系统设计方案的可行性 、仿真设备选择的针对性和合理性 、软件运行环境的可靠性等不能完全达到试验技术指标要求而造成的误差 。
系统的实现方法误差包括硬 、软件两个方面 。硬件方面包括设备的制造误差 、安装误差 、设备间接口误差以及动态过程误差 ;软件等方面包括各类建模误差 、计算方法误差 、初始数据误差等 。
系统工作环境误差指由于系统所处的环境条件变化而引起的误差称为环境误差 ,例如温度 、湿度 、气压 、振动 、磁场干扰等方面的环境条件如果不符合系统正常工作条件 ,便会导致环境误差 。人员误差指在系统分析和设计过程中由于参加人员主观因素而引起的误差称为人员误差 。人员误差产生的原因是多方面的 ,如生理感官 、心理素质 、工作态度和习惯 、业务素质等 。

-2-
仿真系统中的误差概述
2 .1 误差分类
从系统仿真观点看 ,仿真系统中误差主要来自硬件 、软件和数据三个方面 。从系统观点看 ,根据系统组成 ,半实物仿真系统误差是以下各子系统误差的综合 :建模误差 、数据误差 、算法误差 、仿真设备误差 、参试设备误差 、通讯与接口误差等 。
按照数学处理方法的不同 ,仿真系统中的误差可以分为系统误差 、随机误差和过失误差三类 。
1)系统误差 :系统误差是按固定不变的或某一类确定规律变化的误差 。系统误差存在于一切动力学系统之中 。
系统误差不易发现(如飞行姿态模拟器三框架轴的不相交度 、不垂直度等),也不具有补偿性(如仿真设备动态响应误差),因而分析 、估计 、修正系统误差很重要 。对于系统误差源的处理主要是调试 、校正 、估计和修正 。
2)随机误差 :随机误差的最大特点是随机性 ,其大小和分布规律事先并不知道 ,但是随着试验次数增加和观测数据的积累 ,这类误差表现出明显的统计规律性 。多数情况下 ,随机误差可视为服从正态分布的随机变量 。
3)过失误差 :过失误差又称为粗大误差 , 是由某些突发性的异常因素造成的 。冲击 、震动等干扰的影响 ,设备故障 ,读数 、记录 、计算过程中的明显过错等方面的因素都会引起过失误差 。过失误差使系统行为严重偏离真值 ,应该按一定的准则予以识别 ,然后将含有粗大误差的因素剔除 。
2 .2 误差分析方法
1)理论分析 :对被试对象和实验装置的原理进行细致的分析 ,找出系统误差及其变化规律 。
2)模型实验 :为了研究实验装置和设备对整个半实物仿真系统精度的影响 ,分别建立各主要仿真设备的数学模型 ,并在被仿真对象数学模型中 ,逐步加入仿真设备特性及其误差模型 ,利用数学仿真方法来研究仿真设备对系统仿真结果的影响 。
3)测试校准 :对实验装置进行静 、动态测试与分析 ,找出系统误差分布规律 ,并进行必要的校正 。如果条件允许的话 ,还可以借助于更精确的仪器 、设备对现有实验设备进行校准 。
4)残差分析方法 :假如不存在系统误差或系统误差可以忽略 ,那么对试验观测数据处理以 后的残差应该是零均值的 ,不会出现任 何趋势 。根据这一性质可以发现系统误差 。
但如果在残差中未发现具有某种系统误差的迹象 ,并不等于说系统不存在系统误差 。判别系统误差 ,主要是对残差进行分析 。除了利用作图分析以外 ,常常利用残差来构造各种统计量 ,借助于数理统计方法进行分析 。从本质上看 ,这种方法属于回归分析的范畴 ,故称为回归模型残差检验法 。
-3-
制导航弹半实物仿真系统中主要仿真设备误差分析
制导航空炸弹半实物仿真系统中 ,主要仿真设备有仿真计算机 、航弹弹体姿态运动模拟器(三自由度液压转台)、线加速度模拟台 、四通道负载力矩模拟器 、导弹 -目标相对运动模拟器(三轴电动转台)等 。
3 .1 弹体姿态运动模拟器(三自由度液压转台)的频率特性测试及机械安装误差
3 .1.1 转台频率特性测试
在理想情况下 ,要求转台对于弹体姿态角的激励信号能够及时地 、按 1∶1 的比例关系进行传递 ,或者说 ,要求转台的传递函数为 1,但实际上这是做不到的 ,转台作为一个动态系统 ,被串联到半实物仿真回路 ,这相当于在相应位置 上增加了一个制导系统非固有的动力学环节 ,改变了制导系统的动力学结构 ,这样 ,势必给制导系统仿真带来一定误差 。
YMT-S2 三轴转台采用的是速度和位置信号双端输 入的复合控制方式 ,为了测试其频率特性 ,同时提供速度和位置两种输入信号 ,我们配置了一个二阶模型 ,其原理如图1所示 。由二阶模型的位置输入信号可以得到速度和位置 两路输出信号 。转台频率特性测试的具体方法如下 :将频率特性测试仪输出的正弦信号作为二阶模型的输入 ,模型的位置和速度两路输出分别接入到转台的两个输入端 ,再将转台反馈电位计的输出接到频率特性测试仪的输入端 ,如图 1 所示 。

3 .1.2 转台机械安装误差
理想情况下转台的驱动方程为 :




3 .2 四通道液压负载模拟台的静 、动态特性分析
作用在舵机输出轴上的力矩包括舵机输出的主动力矩和各种负载力矩 ,其平衡关系为 :

其中 Mz 为舵机输出的主动力矩 ,而等式右端表达式即为负载力矩 。负载力矩仿真器提供等式右端的负载力矩 ,其中第一项为惯性力矩 ,第二项为阻尼力 矩 ,第三 、第 四项为铰链力矩 。在这些负载力矩中 ,舵转角铰链力矩和攻角铰链力矩两项占比重最大(约占70%,其余各项总和不超过总负载力矩的30 %),尤其是舵转角铰链力矩是最主要的 ;阻尼力矩最小 ,通常可以忽略 。负载力矩仿真器主要是用来仿真舵转角的负载力矩 ,而其余各项力矩在综合计算中予以处理 ,这样做主要是为了简化仿真器的设计 。
对舵面负载力矩模拟 台主要有以下几个方面的技术要求 :1)最大负载力矩和力矩加载精度 ;2)负载惯量 ;3)输出轴的转角范围和转角精度 ;4)负载尺寸 ;5)最大速度 ;6)跟踪精度 ;7)频率响应特性等 。与其相关的误差源包括 :四轴不 相交度 、垂直度 、加载系统动态响应误差 、舵机输出和加载系统之间的一步延时误 差 、接口转换误差(D/A、A/D、D/D、A/A、比例尺)等 。
我们在特定条件下 ,对舵面负载力矩模拟台的角度系统的静态精度和频率特性进行了测试分析 。四个通道的频率特性测试结果绘制在图 2,其中在幅频特性(上图)中,纵坐标为幅值误差 ε(A),在相频特性(下图)中,纵坐标为相位误差 Δφ。幅值误差和相位误差计算公式如下 :

其中 A 和φ分别为幅值和相角的期望输出值(理论值),A 和φ分别为实测值 。

3 .3 线加速度模拟器误差分析与建模

线加速度计感受的加速度 an与随动台盘 转角α的关系,如图 3 所示 。线加速度计感受的加速度 an与随动台转盘转角的关系如下 :

α从0 ~±90°变化 ,因而能够获得两个方向所需的加速度值 。利用线加速度台原则上可以实现导弹的线 运动(即质心位移运动)的仿真 ,仿真的精度主要取决于离心机转速 ω的恒定性 、离心机转盘半径的精度 、切向加速度的波动性和随动台转盘的角位置控制精度 。
加速度台的误差因素包括 :由于离心机半径的误差和转速的不稳定造成的加速度测量误差 ;随动台角位置控制不精确造成的误差 ;加速度计摆锤质心与随动台回转中心不重合造成的误差等 ,综合考虑以上各误差因素 ,经推导可得到线加速度台的总误差表达式如下 :

-4-
结束语
制导航弹半实物仿真系统涉及到的设备和实物部件比较多 ,设备间接口关系比较复杂 ,仿真系统内部及周边环境中存在多种干扰因素 ,因此 ,系统误差源多且复杂 ,这就给定量地分析整个仿真系统置信度和最终试 验结果的精度带来一定的难度 。本文从各个设备入手 ,分析了系统的静态和动态误差 。对弹体姿态运动模拟器(三自由度液压转台)、舵面负载力矩模拟台 、线加速度模拟器等主要仿真设备误差进行了分析 ,得到了误差的定量结果 ,为进一步分析整个仿真系统的精度奠定了基础 。
#The End #
作者:孟秀云 ,刘藻珍 ,王肇敏 ,魏华梁
图片及内容来源:互联网
-------------------------------------------------------
本内容来源于互联网,版权归原作者所有,供学习交流使用,严禁商用,如有侵权请联系我们删除。
-------------------------------------------------------
相关文章,在仿真秀官网搜索:
25型客车车体参数化仿真系统开发与应用/ 【技术大联盟】虚拟样机技术的技术与方法体系研究 / 世间再无霍金,时间永留简史