ANSYS Workbench分析实例之牛顿摆

关注***:“CAE之道”,享受专属答疑服务,精彩文章不错过。
牛顿摆是个解压且能激发创造力的玩具。除此之外,它还向人们昭示着自然界中两个极其重要的基本物理定律——能量守恒定律和动量守恒定律。
孤立系统的动量是守恒/恒定的。即当两个物体碰撞时,碰撞前后的动量保持不变。
动量守恒定律是最早发现的一条守恒定律,它渊源于十六、七世纪西欧的哲学思想。法国哲学家兼数学、物理学家笛卡尔,对这一定律的发现做出了重要贡献。

其实,笛卡尔与瑞典克里斯汀公主既没心形曲线也没爱情,有的只是命债……

牛顿爵士不会想到,在他逝世以后的240年,一个他从来没有玩过的玩具——牛顿摆诞生,并且以他的名字命名。实际上,牛顿摆既不是牛顿发明的,也不是他第一个提出玩具演示法则的。
1662年,克里斯提安·惠更斯等三位科学家向皇家学会提交的论文中首次提到了这种摆所展示的原理。克里斯提安·惠更斯尤其对牛顿摆的发明做出了最大贡献。
至于为什么要以牛顿的名字命名,可能是因为动量守恒定律是从牛顿第二定律中得出来的吧!也或者是牛顿对经典力学的贡献要远高于惠更斯这些人,也未可知。

一般来说,牛顿摆由5(奇数)个小球组成,将最左侧的球抬高至一定的高度,让其自由回落,回落时碰撞紧密排列的另外四个球,最右边的球将被弹出,并仅有最右边的球被弹出。
当然此过程也是可逆的,当摆动最右侧的球撞击其它球时,最左侧的球会被弹出。当最右侧的两个球同时摆动并撞击其他球时,最左侧的两个球会被弹出。同理相反方向同样可行,并适用于更多的球,3个,4个甚至5个。

如下图,当最右边的小球被提起时,它随着高度的增加而获得重力势能,而动能为零。释放后,随着球体高度的降低,小球重力势能将全部转化为动能(理想状态)。同时,小球在向下摆动时会获得动量,并在底部位置获得最大动量。
在与下一个球撞击时,最右边的小球失去所有动能(也失去了所有动量),并且没法继续运动。但是,整个系统的动量不会丢失(动量定理),因此动量会传递到它击中的小球上。动量依次传递,直到传递到最左边的小球,最左边的小球获得动量产生动能,无法继续传递,只能再次摆起,将动能转换成重力势能………………


我们发现牛顿摆中的小球是有2根细绳连接。细绳与支架的2个连接点、细绳与小球的1个连接点,3个点组成一个三角形结构。由于三角形的稳定性,确定了小球只能在支架中间的平面内移动,不会发生偏移,这也是牛顿摆必须具备的条件;


牛顿摆在运动过程中,小球与小球之间会发生碰撞,这就需要我们对每个小球之间建立接触;

细绳与支架的连接点(共5个)需要建立转动副(Body-Ground),并且要注意旋转轴Z轴方向,方向与实际不一致时需调整转动副坐标系。建立后的模型如下:

这一步非常重要,关系到是否能仿真成功;

自由网格划分。

设置2个载荷步,来模拟牛顿摆的2个动作(具体请看Step7):


小球在重力作用下做圆周运动,所以首先需要设置一个标准地球重力,并修改重力方向;



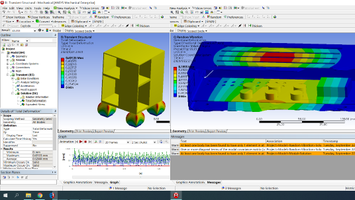
我们提取两个运动(最右边和最左边)小球的动能结果:



对于一些专业的多体动力学软件,如MSC的Adams等,做这样的仿真比ANSYS就简单多了,以下是笔者用Admas做的牛顿摆运动仿真,花费的时间不到ANSYS的三分之一。