机构展开中的Hinge连接单元的两种用法:铰链展开锁定、“拧瓶盖式”压紧释放
文章亮点
- 作者优秀
- 从业经验5+年/博士学历/特邀专家/独家讲师
- 平台推荐
- 内容稀缺

在前一篇《使用Abaqus显式动力学分析模拟采用Hinge连接单元的铰链机构展开》中介绍了使用Hinge连接单元实现机构同步展开的仿真过程。
这一篇将介绍使用Hinge连接单元实现机构分步展开过程,即机构不同部分按照规定的时序依次展开。为此特意使用Hinge连接单元模拟“拧瓶盖式”解锁。
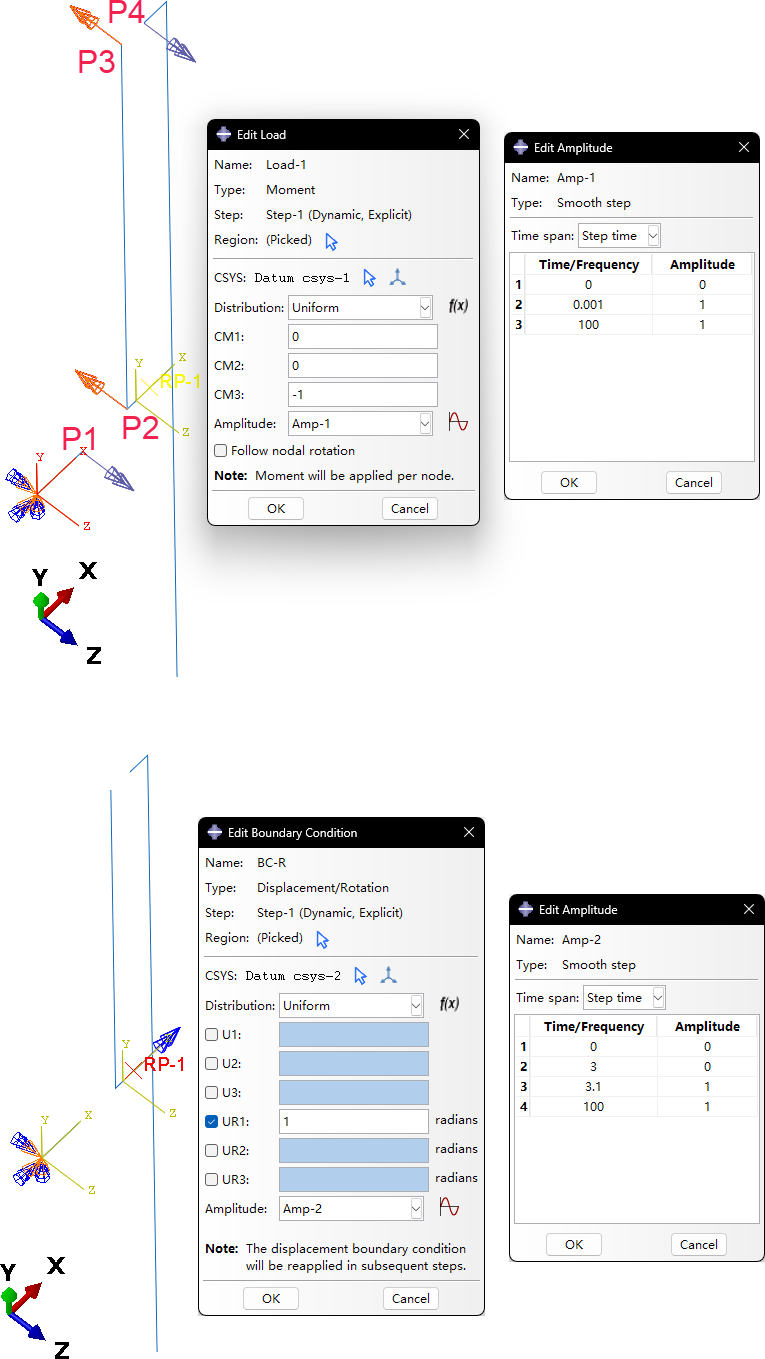
先看一个动图,简单起见,沿用前一篇模型并进行简化,竖直两杆在“压紧”状态下先整体转动90°并将转动铰链锁定,长杆与短杆解锁,长杆展开180°并锁定。
开始整活。
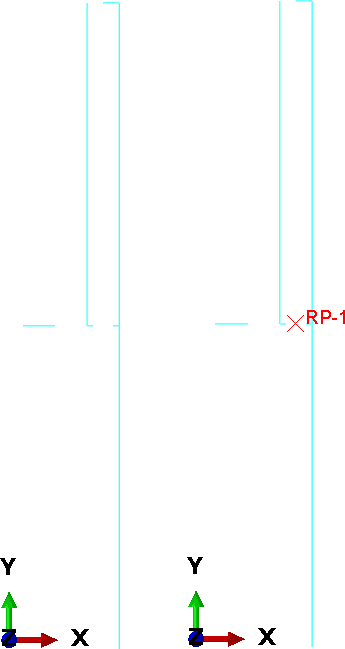
Step-1,准备梁单元模型。创建一个Wire Part,画几条线。划分网格,单元类型B31(Explicit),材料、截面、梁单元方向定义略。装配后,在两竖线中间创建RP-1,作为压紧-解锁点。
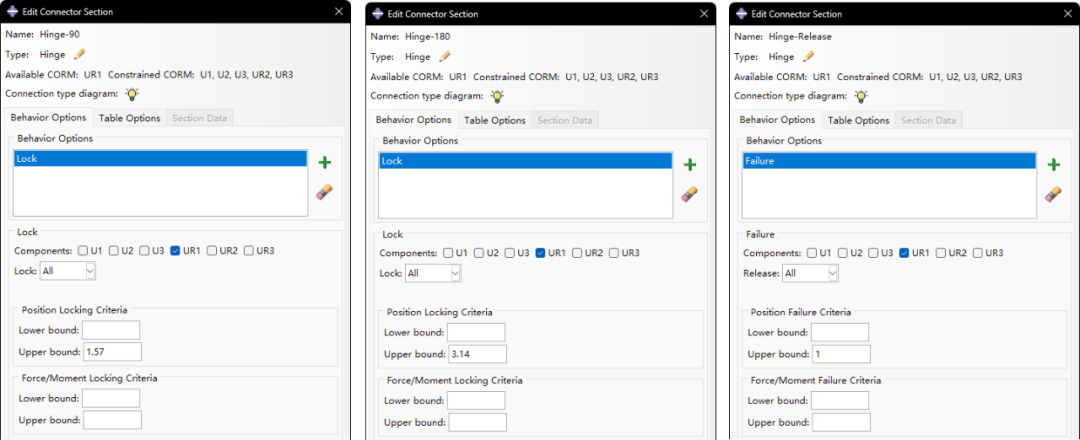
Step-2,定义连接单元。定义3个Hinge类型的连接单元截面,1个90°锁定,1个180°锁定,1个转动1弧度失效。
Step-3,连线、赋连接单元截面。在Interaction模块,创建Wire。依次创建4条线H1、H2、H3、H4,其中,H1:P1-P2;H2:P3-P4;H3:P5-RP1;H4:P6-RP1;注意点的顺序。Sys-1为装配自动创建的坐标系。以P5为原点,创建坐标系Sys-2,各轴向与Sys-1相同。给Wire赋Hinge截面,H1:Hinge-90;H2:Hinge-180;H3/H4:Hinge-Release。注意,H1、H2方向均选Sys-1,但分别绕2轴(Y轴)转90°、-90°。H3、H4方向选Sys-2,即铰链绕Sys-2的X轴转动。
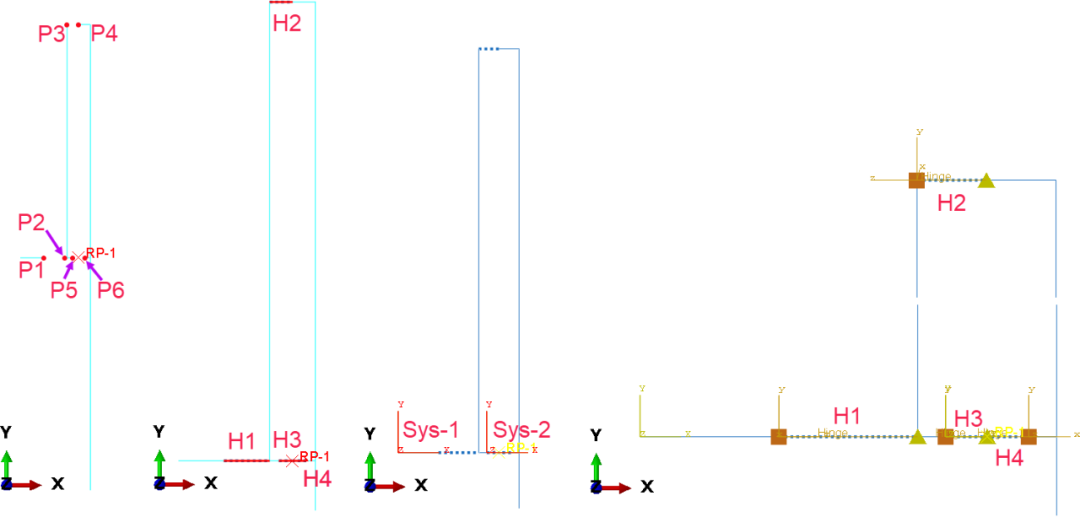
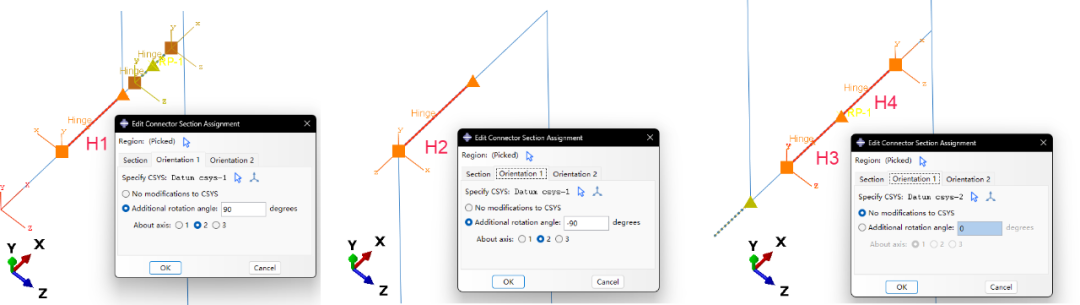
思考:H3、H4两个Hinge对顶有啥好处?其中一个Hinge换成Coupling约束,放开UR1自由度可否?其实,前一篇也可以用隐式动力学计算,本例呢?
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2025-11-12
最近编辑:7小时前

博士
专注于有限元分析领域,联合创作...

相关推荐
最新文章
