接触基础知识:摩擦为啥是个麻烦

我所常用的材料:摩尔库伦塑性的计算接触分析中,大家常常会发现一个不考虑摩擦的接触仿真非常容易收敛,而考虑摩擦的接触仿真则收敛非常困难,那么原因是啥呢,今天就来说说。
首先,先说一下最简单的Coulumb摩擦,摩擦的基本原理其实就是我们高中学的那套
其中 为摩擦系数。
那么其实看过我讲MC材料模型的就会知道,这个Coulomb与MC那个Coulomb是一个人,理论也是一个理论,那么就会都有一个问题,
就是一个激烈的转折问题(大家看MC本构算法的时候是不是也觉得实现起来不容易)
所以就涉及到一个动静转换的问题,这个问题呢,在显式分析中还是比较好求解的,你可以根据当前的确定一个试验的切向力 ,看看他是否会超过摩擦系数与接触压力 的乘积 (这里的 也是求出来的,无论你是用penalty,LM, 或者ALM)。
而这玩意在隐式求解中就麻烦咯,涉及到对不同的两个阶段进行线性化,求解切线刚度矩阵,具体过程是很复杂的,这里直接给最后的公式
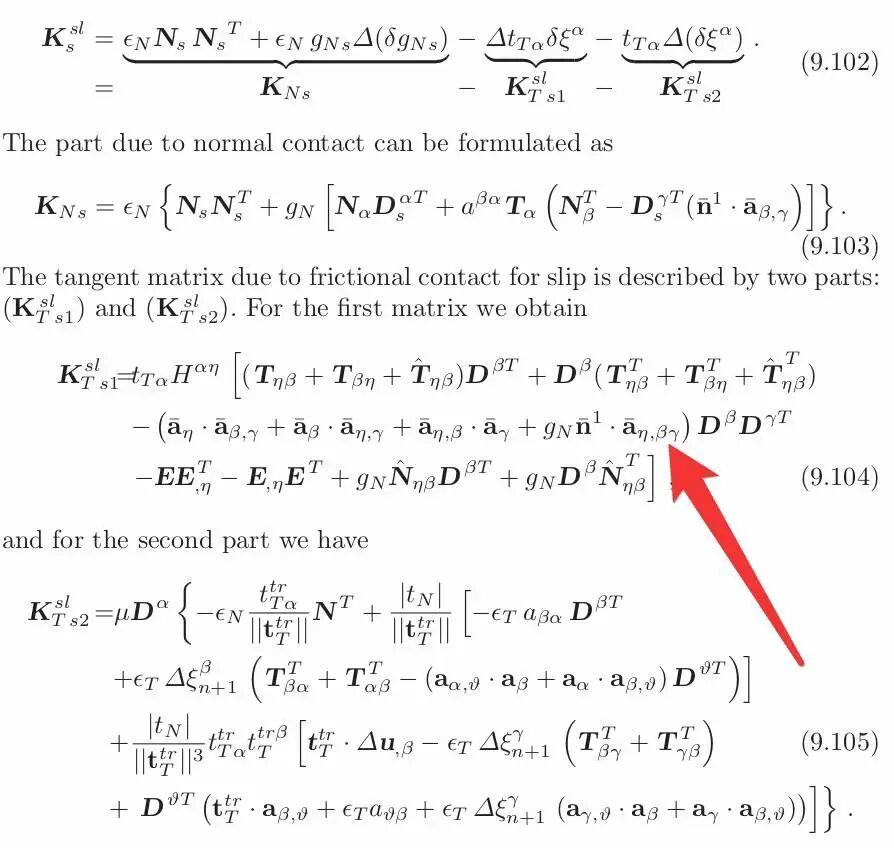
就上述就是滑动状态下的切线刚度矩阵(9.104, 9.105),是不是光看就觉得麻烦,相比之下法向接触的公式要简单很多就是9.103中的那些。
然后更麻烦的在哪呢,在于矩阵的不对称性,大家可以看到在9.103中法向的矩阵都是
这种形式,这就是一个对称矩阵,求解也很容易,而对于摩擦可就不是了, 你就看着 就这些,一看也不是一个对称矩阵,所以又造成了矩阵求解的困难。
Abaqus中呢为了一方面处理这种问题,一方面呢想保证计算效率,一方面呢想保证收敛性,所以做了一个设定,在摩擦系数 的时候采用对称矩阵求解,因为他认为这时候非对称性还不是那么强,影响还好,然后在 的时候就要采用非对称求解了, 难度与效率都完全不同。
然而现实世界中,我经常看到工程师朋友们,不管啥材料,上来就给摩擦系数输入个 。非常的快乐与痛苦!
如果大家对9.104 -9.105 感兴趣一方面可以看一下 Peter Wriggers 的 《Computational Contact Mechanics》, 2006,如果特别有兴趣我可以搞个视频讲讲,如需要请留言。



