导读
我们的工作是垂直起降无人机概念设计优化和垂直起降轨迹优化的交叉点。飞行器设计和轨迹优化的结合被称为同时设计和轨迹优化,并且已经针对各种机械和航空航天应用进行了研究。然而,对于垂直起落飞机,同时设计和轨迹优化还没有很好地探讨在文献中。大多数研究工作只涉及飞行器设计或飞行轨迹,而不是两者兼而有之。我们的工作旨在填补文献中的这一空白。eVTOL的设计面临一个根本性矛盾:垂直起降需要高功率推进系统,而高效巡航则需要优化的气动性能。传统设计方法往往将飞机设计与飞行轨迹优化割裂处理,导致能源效率低下或关键部件(如电池、电机)过度设计。密歇根大学Shugo Kaneko和Joaquim R.R.A. Martins教授团队在《Aerospace Science and Technology》发表的最新研究中,提出了一种同步优化方法,将eVTOL的概念设计与起飞轨迹优化完全耦合,显著提升了整体性能。这项研究不仅为无人机设计提供了新思路,也为未来大型eVTOL客机的开发奠定了理论基础。
摘要
在设计垂直起降(VTOL)飞机时,考虑各种操作条件是至关重要的,包括悬停,翼载巡航和过渡。过渡和爬升阶段对飞机外形设计至关重要,因为它们决定了电机和电池的尺寸。然而由于过渡动力学的复杂性,在以往文献中这些飞行阶段往往被忽略或简化,针对这一局限性,提出了垂直起落飞机概念设计和起飞轨迹的同步优化方法。同时以完全耦合的方式将起飞-着陆过渡和爬升-着陆动力学结合到VTOL设计优化中。本文研究了升力加巡航和尾坐式无人机的投送任务设计轨迹优化问题。与解耦优化相比,同时优化可将总能耗降低7.4%,与升力加巡航配置中的迭代顺序优化相比可降低4.8%。它还实现了29%的能源损耗,从非耦合优化的尾座配置。在无人机尺寸确定中进行起飞轨迹优化能够准确估计起飞轨迹和爬升能量,从而避免电池尺寸过小或过大。此外,此外,同步优化通过提前转换,以牺牲车辆重量为代价,换取了更节能的爬坡效果。只有通过同时优化来捕捉这些系统级的权衡;解耦或迭代的顺序优化则不可以。
主要研究内容
本文旨在量化在垂直起落无人机概念设计过程中,将轨迹优化纳入考量所带来的效益增益。为达成这一目标,我们对三种不同的设计与轨迹优化方法展开了深入比较。第一种方法是常规优化,此方法在优化无人机设计时完全不考虑轨迹因素,待无人机设计完成后,再针对既定的无人机开展起飞轨迹优化。我们将其命名为非耦合优化,原因在于该方法无法有效解决设计与轨迹之间存在的耦合问题。第二种方法为迭代顺序优化,它通过按顺序反复执行设计优化与轨迹优化流程,在一定程度上捕捉了设计与轨迹之间的耦合关系。最后一种是同时优化方法。该方法通过求解一个综合性的整体优化问题,实现无人机设计与弹道的同步优化。研究结果表明,相较于迭代顺序优化,同时优化能够全面捕捉系统层面的权衡关系,这些权衡关系是迭代顺序优化难以完全解决的,因而能够得出最优设计方案。研究团队发现,起飞和过渡阶段(从垂直升力转向巡航)是能耗最高的环节,但传统方法常简化处理。例如,用“60秒悬停能耗”估算起飞需求,实际误差可达9.4%,直接导致电池过度设计。
图1按飞行阶段划分的能源消耗细目。
团队提出同步设计-轨迹优化框架,采用二自由度点质量模型,涵盖纵向运动(爬升、加速)和能量消耗。基于叶片元素动量理论(BEM)分析旋翼性能,考虑悬停、过渡、巡航不同工况。结合预失速与后失速数据,精确模拟机翼在低速大迎角下的升阻力特性。最小化全程任务能耗(包括起飞、巡航、悬停、降落)。设计变量为飞机总重、机翼面积、巡航速度、电机功率、旋翼几何参数等。研究对比了三种优化方法在两种典型eVTOL构型(升力+巡航、尾座式)下的表现:1. 升力+巡航构型(Lift-plus-cruise)同步优化总能耗降低7.4%,比迭代序贯优化进一步减少4.8%。设计权衡:选择较低巡航速度(39.3 m/s vs 44.3 m/s),牺牲少量巡航效率以大幅降低起飞能耗(减少24%)。旋翼优化:叶片设计更适应过渡阶段的斜向气流,提升前飞效率(推力/阻力比提高53%)。2. 尾座式构型(Tailsitter)同步优化减少总能耗29%,主要源于精准的电池尺寸设计。由于尾座式飞机过渡更快,同步优化与迭代序贯优化的差异较小(能耗仅差0.46%)。
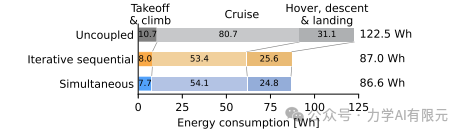
图2优化的尾坐式无人机按飞行阶段的能量分解比较。
图3静态设计优化、迭代顺序优化和同时优化之间的尾座式无人机优化设计的比较。
图4优化起飞轨迹。红色矢量表示转子推力的大小和方向。灰色的飞机剖面显示机身俯仰角。推力矢量和物体姿态以1秒的间隔绘制
结论和展望
通过改变无人机的设计和起飞轨迹,我们比较了三种优化方法,以最大限度地减少VTOL飞行使命的总能量消耗。解耦优化首先通过近似60秒悬停起飞能量来进行无人机设计优化,然后在确定无人机设计的同时进行起飞轨迹优化。迭代顺序优化将无人机设计优化和起飞轨迹优化作为一个定点迭代进行重复。最后,同时优化解决了同时改变设计和轨迹变量的整体优化问题。对于升力加巡航布局,同时优化比非耦合优化减少了7.4%的能耗,比迭代顺序优化减少了4.8%。同时优化选择了较低的巡航速度和较重的电机。这增加了飞行器的重量,但它能够实现节能的起飞和爬升轨迹,尽可能地利用翼载飞行。总的来说,起飞能量的减少比重量的损失更显著。这种系统级的权衡只能通过同步优化来实现。对于尾座布局,迭代顺序优化和同时优化导致了29%的能量减少相比,非耦合优化。解耦优化高估了起飞和爬升的能量消耗,导致电池过大。另外两种优化方法通过结合起飞轨迹优化避免了电池过大。这使得能够更准确地估计起飞能量消耗,否则由于起飞过渡的复杂动力学而具有挑战性。在同时优化和迭代顺序优化之间,总能耗仅相差0.46%。研究结果表明了在无人机概念设计中考虑起飞轨迹优化的重要性。此外,根据垂直起落飞机的配置,同时优化可以找到一个比迭代顺序优化上级的设计解决方案。未来的工作建议包括考虑螺旋桨声学和噪声约束,这是交付无人机和空空导弹车辆的重要因素。还应考虑发动机和电池的热模型,因为热要求(除了功率、扭矩和能量要求之外)可以驱动推进系统的尺寸。使用电机和ESC效率的效率图也增加了结果的实用性。除了改进无人机设计模型外,优化设计对各种使命要求的灵敏度研究,特别是有效载荷重量和航程,将为eVTOL设计空间提供有用的见解。
参考文献:
Simultaneous optimization of design and takeoff trajectory for an eVTOL aircraft







