ANSYS workbench橡胶护套的非线性静力学分析

本文摘要(由AI生成):
该案例展示了一个橡胶套密封件的非线性静态结构分析,包括几何非线性、非线性材料行为和状态非线性。该案例的目的是展示surface-projection-based接触方法的优点,并确定橡胶护套密封件的位移和应力结果。文章详细介绍了如何设置模型、定义单位系统、添加圆柱坐标系、定义Remote Point、定义Named Selections、设置接触关系、分析设置、边界条件设置、添加Remote Displacement、解决方案和查看结果。非线性计算的精髓主要在接触的设置,需要不断修改接触算法等参数。
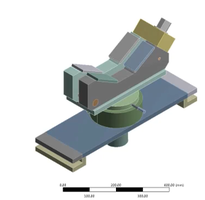
该案例来自Mechanical Tutorials Chapter 2: Nonlinear Static Structural Analysis of a Rubber Boot Seal。该橡胶套密封件示例显示几何非线性,非线性材料行为(橡胶)和状态非线性(接触)。该示例的目的是显示surface-projection-based接触方法的优点并且确定橡胶护套密封件的位移和应力结果。
1.打开静力学模块,导入模型
2. 编辑材料
点击Click here to add new material,输入Rubber Material,在左侧Hyperelastic栏下双击Neo-Hookean,在Initial Shear Modulus栏下输入1.5,在Incompressibility Parameter D1 Value栏下输入0.026.
3.定义单位系统
选择如图的单位系统
4.设置模型
设置Surface Body的厚度为0.01mm,并定义为刚体,Solid设置材料为Rubber Material。
5. 添加圆柱坐标系
Type 选择为Cylindrical,Coordinate System选择为Manual,在Origin中Define By 选择为Global Coordinates,XYZ的值都为0。Principal Axis 中Axis选择Z,Define By选择为Global Y Axis,Orientation About Principal Axis中Axis选择为X ,选择Global Z Axis,并重新命名为Cylindrical Coordinate System。
6. 定义Remote Point
右键model,插入Remote Point。Geometry中选择圆柱表面,X Coordinate, Y Coordinate和Z Coordinate都设置为0,Behavior设置为 Rigid。
7. 定义Named Selections
(1)选择圆柱面,右键Named Selections,并重新命名为Cylinder_Outer_Surface。
(2)选择橡胶圈的所有内面,右键Named Selections,并重新命名为Boot_Seal_Inner_Surfaces(此处一共24个面)。
(3)选择橡胶圈的所有外面,右键Named Selections,并重新命名为Boot_Seal_Outer_Surfaces(此处一共27个面)。
8. 设置接触关系
(1)选择Frictional接触方式,Scoping Method设置为Named Selections,Contact设置为Boot_Seal_Inner_Surfaces,Target设置为Cylinder_Outer_Surface,Target Shell Face设置为Top,Frictional Coefficient Value输入0.2,Set Behavior设置为Asymmetric,Detection Method设置为On Gauss Point,Interface Treatment设置为 Add Offset, Ramped Effects。
(2)还有两个是自接触,具体的参数这里就不赘述了,直接上图
9. Analysis Settings
Number of Steps设置为3,Auto Time Stepping设置为On,Define By设置为Substeps,Initial Substeps和Minimum Substeps 设置为5,Maximum Substeps设置为1000,Large Deflection设置为On。
分别设置第2步和第3步,如图:
10. 边界条件设置
在Supports中选择Displacement,Geometry中选择橡胶套密封的两个侧面,Coordinate System设置为Cylindrical Coordinate System,Y Component设置为0。
还有两个Displacement如下图设置:
添加Remote Displacement,Remote Point设置为Scoping Method,Remote Point中选择Remote Point,设置X Component, Y Component, Z Component, Rotation X, Rotation Y和 and Rotation Z为Tabular,在右侧的Tabular Data中Y的第2步和第3步设置为-10,RZ中第3步设置为0.55 rad。
11. Solution
添加Total Deformation,Equivalent (von-Mises),Equivalent (von-Mises),在Geometry中橡胶套,并提交计算。
12. 查看结果
非线性的计算时间一般都比较长,需要耐心等待。如果出现不收敛,可修改网格尺寸。在计算中,我使用了默认的网格划分,计算出现不收敛,后来把网格尺寸改成1mm后计算收敛了。
小结:非线性计算的精髓主要在接触的设置,对于复杂模型,需要不断的修改接触算法等参数,这就需要对接触的深刻理解以及非线性分析的经验。关于接触,目前个人觉得讲的非常好的是周炬老师的书(前面小鲸鱼已经介绍过很多次),再者就是可以去参考帮助文档(最近笔者也一直在看帮助,收获很大)。PS:非线性的计算常常需要消耗很长时间,而且还会经常失败,这就很考验分析人员的意志力,大家可以搞搞自己的兴趣爱好的啥的,我比较喜欢在群里聊天,周炬老师的书上有一个交流群,大家可以进群聊聊技术,吹吹牛啥的,哈哈。











.png?imageView2/2/h/200)