哈尔滨工业大学周彬教授:线性系统理论
“线性系统理论”和“自动控制原理”是控制科学与工程学科最重要的基础理论。线性系统理论特别是线性定常系统理论在20世纪70~80年代已经发展成熟,因此,同期或者稍后的90年代中产生了大量优秀的关于线性定常系统理论的教材和著作,全面概括了线性系统领域的基础性成果。90年代,非线性系统理论(特别是反馈线性化理论)的发展又给线性系统理论的研究提供了一些新的视角,但这些新视角并没有在现有的线性系统理论教材或专著中得到很好的体现。鉴于此,作者撰写了《线性系统理论》(科学出版社,978-7-03-078492-6,2024.5)一书。









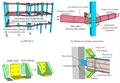
这里仅举一个例子。相对阶以及与相对阶密切相关的输入输出规范型是非线性系统理论中非常重要的概念和工具。虽然将它们从非线性系统平移到线性系统是简单和直接的(图1),甚至最初就是针对线性系统所提出的,但是它们在大多数线性系统理论的教材或者专著中很少或没有被提及。事实上,借助这两个概念,线性系统理论中的许多问题,如能控规范型、极点配置、解耦控制、输出反馈镇定、输出轨迹跟踪和状态跟踪等,都可以非常简洁地得到解决,它们之间的内在联系也能深刻地予以揭示。因此,可以用非线性系统理论的框架来表述线性系统理论。这种表述方式最大的好处在于,很容易形成从线性系统理论到非线性系统理论的平滑过渡,为读者进一步学习非线性系统理论提供一定的基础。

图1 MIMO线性定常系统的输入输出规范型
本书主要具有如下特点:
▋1. 内容具有一定的深度、广度和特色
例如,Morse规范型和关于不变因子配置的Rosenbrock定理是线性系统理论中两个非常深刻的结果,但现有(特别是国内出版的)专著或教材对此缺少系统性的介绍,本书则弥补了这一缺陷;输出和状态跟踪问题是比输出调节更为常见的跟踪控制问题,但这方面的结论散见于大量学术论文之中,本书则对此进行了系统性的整理(图2);针对线性系统的特殊性,本书采用简单、直接、易于操作和理解的方法完整地讨论了二次最优控制问题;传递函数的实现理论具有非常丰富的内容,但其与状态空间方法体系的关联不大,故仅做简单介绍,相反地,多变量系统的各种规范型能真正体现多变量系统的特色,是线性系统理论的精华,故本书用较大的篇幅进行详细的介绍;模态控制几乎不见于任何线性系统理论的教材和专著,但鉴于该方法在物理上的直观性,本书对其进行了一番较为详细的梳理。

图2 基于逆系统的前馈+反馈二自由度输出跟踪控制框图
▋2. 介绍理论的同时也注重理论的实际应用
小车倒立摆和航天器轨道交会控制系统(图3)作为两个贯穿全书的实际例子,用来验证本书所介绍的理论分析和设计方法的有效性,包括线性系统的零点、各种能控与能观性、稳定性、系统分解、反馈镇定、二次最优控制、观测器设计、输出跟踪、状态跟踪和输出调节等。Watt蒸汽机离心调速器被认为是自动控制系统的杰作(图4),用于验证书中所介绍的稳定性概念和理论,包括平衡点、线性化和Routh判据等。

图3 小车倒立摆(左)和航天器轨道交会控制系统(右)

图4 Watt蒸汽机离心调速器
▋3. 结构安排具有比较鲜明的特色
例如,本书每章后面都有一定数量的习题(部分为作者所设计,难度总体较大,有的甚至可以扩充为研究课题),它们对于加强读者对本书内容的理解,甚至培养研究生的学术研究能力都是有一定益处的;每章后面提供了数量不等的附注,其内容主要包括三个方面:一是对该章正文内容的来源进行说明;二是对正文内容做适当扩充,并指向具体的参考文献,以方便读者进一步阅读和研究;三是对正文内容表达作者个人的看法。
▋4. 有机融合了作者的一些研究成果
例如,能控能观性分析的部分结论、各种指数集(可逆性、输入函数能观性、输出函数能控性)的定义和性质、多输入多输出系统输入输出规范型的构造方法、Morse规范型的部分结论、可解耦质系统与能控规范型、对称化子与能控规范型、模态控制的部分结论、最小多项式配置问题及其解、固定终端有限时间二次最优控制的部分结论、参量Lyapunov方程及其性质、对偶观测器的部分结论、干扰观测器的部分结论和输出跟踪以及状态跟踪的部分结论等。
“线性系统理论”作为微分方程、控制理论和线性代数的完美结合体,不仅应在数学地图上有一席之地,还应看作是描述自然规律的一种基础理论。期望本书能为树立上述观点起到一点推动作用。

周彬,哈尔滨工业大学教授,博导,航天学院控制理论与制导技术研究中心主任。国家杰出青年科学基金获得者,全国百优秀博士学位论文奖获得者,中国青少年科技创新奖获得者,国家自然科学基金优秀青年科学基金获得者,国家自然科学奖二等奖获得者,教育部新世纪优秀人才支持计划入选者。
在控制理论和工程领域的主流和权威期刊Automatica、IEEE Transactions on Automatic Control、SIAM Journal on Control and Optimization等上发表论文100余篇。目前担任国际自动控制联合会(IFAC)旗舰期刊Automatica、IEEE控制系统学会旗舰期刊IEEE Transactions on Automatic Control、IEEE航空航天与电子系统学会旗舰期刊IEEE Transactions on Aerospace and Electronic Systems以及IEEE系统、人与控制论学会旗舰期刊IEEE Transactions on Systems, Man, and cybernetics: Systems等期刊的编委,是中国自动化学会控制理论专业委员会委员、IFAC线性控制系统技术委员会委员、FAC非线性控制系统技术委员会委员、IFAC航空航天技术委员会委员。主要研究方向为时变系统理论、时滞系统理论、非线性控制理论和飞行器控制等。



