简介
目录
评价
服务:
- 课程资料下载
- 90天知识圈
- 在线开票
本课适合哪些人学习:
(1)建立机电一体化电驱动模型;
(2)建立新能源汽车变速器NVH分析模型
(3)理工科院校硕士研究生
(4)学习型仿真工程师
(5)电机、齿轮等学习者
你会得到什么:
1、梳理建立机电一体化模型的思路和方法;
2、如何在Romax中建立电机的模型加入电磁力、转矩脉动进行振动响应分析;
3、如何获取romax中需要的径向电磁力、转矩脉动请参考电磁振动课程的思路进行分析;
4、通过经验修形来指导传递误差、接触应力、单位长度载荷等分析;
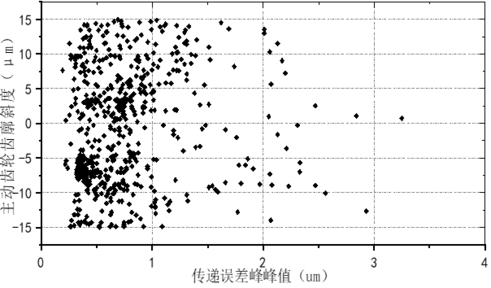
5、通过RomaxV2遗传算法来指导微观修形设计;
6、如何添加响应节点,并且查看响应节点处的振动响应;
7、轴承处动态力的提取,(分享了提取到的轴承动态力如何在第三方软件virtual lab中进行振动响应分析等。
课程介绍:
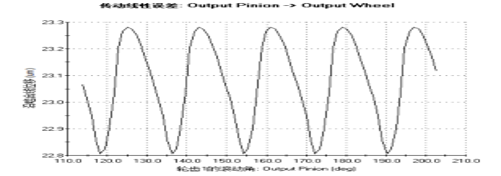
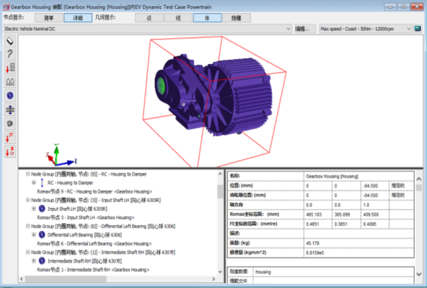
知识点讲解:(1)机电一体化模型的简述(Romax,simcenter 3D,AVL等);(2)建模过程综述 a.壳体添加,之后响应节点添加(两种方法),b.电机建模(两种方法),c电磁激励添加(如何获取电磁激励?两种方法:电磁振动章节讲过)(其中优化后的电磁激励数据也是相同的导入方法;(3)齿轮传递误差激励、啮合刚度激励;(4)微观修形降低传递误差激励(优化);(5)振动响应分析(显示dB与试验数据对标)
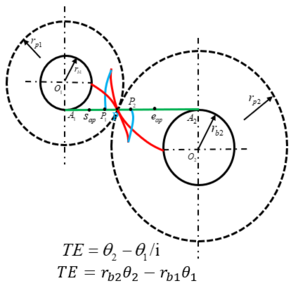
传递误差计算建议采用NVH 01官方教程外啮合齿轮计算方法:NVH 01教程我已候补上传
课程相关图片:





讲好课程,莫问前程
相关推荐
 ¥2800
¥2800 ¥5980
¥5980¥6980 ¥2199
¥2199 ¥2199
¥2199